

Une réponse au rapport du comité d'examen Society of Scientific Exploration de 1997 de Bruce Maccabee
sources: Journal of Scientific Exploration, Vol. 13, No. 3, pp. 421–459, 1999
Ce texte est écrit en réponse au comité de révision de la Society for Scientifique Exploration (parfois appelé le « Sturrock Panel » d’après le Dr Peter Sturrock qui a convoqué ce dernier avec le soutien d’autres membres de SSE et de Laurence Rockefeller.) Il a été publié dans le Journal of Scientific Exploration Vol 13, pg. 421.
RÉSUMÉ
Les observations radar et radar-visuelles faisaient partie des divers types d’observations d’OVNI discutées par le comité d’examen parrainé par la Society for Scientific Exploration à l’automne 1997. Bien que plusieurs cas bien décrits impliquant un radar aient été présélectionnés et présentés au panel, comprenant des cas dans lesquels des objets apparemment structurés ont été vus concomitamment avec la détection radar, l’opinion du panel était que quelques-uns des cas pourraient représenter « des cas rares mais significatifs”, des cas rare d’erreur radars ou encore d’activités militaires secrètes. » Aucun des cas n’a représenté de processus physiques inconnus ou dénotant l’implication d’une intelligence extraterrestre. L’un des membres du panel (Eschleman) a proposé une explication générale des cas de radar en termes d’effets atmosphériques, y compris la réfraction et la canalisation. Rien n’indique dans le rapport complet que les membres du panel aient proposé des explications spécifiques. pour tout rapport, ou que tout membre du panel a été en mesure de prouver que des effets atmosphériques de toute sorte pouvaient expliquer les observations radar et radar-visuelles. Cet article, une réponse à l’opinion du panel, démontre qu’un examen attentif des effets atmosphériques n’est pas suffisant pour expliquer au moins certaines des observations radar et radar/visuelles et photographiques qui ont été signalées au fil des ans.
INTRODUCTION
Lors de l’atelier d’octobre 1997 parrainé par la Society for Scientific Exploration, Jean-Jacques Velasco et Illobrand von Ludwiger ont nombre de rapports de « cibles radar anormales » ou d’OVNIS radar ainsi que quelques cas dans lesquels des objets ont été vus à en même temps que le radar a détecté un objet non identifié (radar-visuel OVNI) (Sturrock. 1998). Velasco a présenté un excellent exemple de la catégorie radar-visuel [ ndlr: cas « J.C. Duboc » où le visuel corrélé au radar est loin d’être un fait établit ] dans lequel un objet volant vu au-dessus des nuages (altitude environ 10 km) par un équipage d’avion à une altitude d’environ 11 700 m. L’objet, en forme de « disque gigantesque » estimé à 1 km de large, a été « détecté positivement » par radar, selon Velasco, pendant une durée de 50 secondes se déplaçant à une vitesse de 110 kts, puis 84 kts puis zéro avant qu’il ne disparaisse visuellement et au radar sans mouvement apparent. Selon Velasco, il semble y avoir « une bonne correspondance entre les mesures radar et les observations visuelles ». Velasco a déclaré que l’Agence spatiale nationale française parrainait le groupe de recherche « Service d’Expertise des Phénomènes de Rentrées Atmosphériques » (SEPRA) avait étudié une centaine de ces cas. Von Ludwiger a discuté de cas de radar en Suisse, y compris une observation visuelle de plusieurs témoins radar qui s’est produite en juin 1995 dans l’après-midi. Selon Von Ludwiger. « Six employés, y compris des opérateurs radar, de l’ATC militaire (contrôle du trafic aérien) à Dubendorf, en Suisse, ont observé depuis leur bâtiment à Klothen un grand disque argenté apparemment à une distance de 1700 mètres. Il semblait tourner et vaciller à une altitude de 1300 à 2000 mètres. Il y avait un enregistrement correspondant d’une cible par trois appareils radar. » Von Ludwiger a également fait référence à plusieurs cas d’observations « radar uniquement » d’objets qui suivaient des « trajectoires anormales ». L’un de ces cas est discuté plus en détail ci-dessous. Il a également été question d’une série d’observations en Nouvelle-Zélande, qui n’ont pas été présentées à l’atelier.
Le rapport sommaire du groupe d’experts (Sturrock, 1998) ignore essentiellement les preuves radar-visuelles, se référant uniquement à « quelques incidents signalés qui auraient pu impliquer des phénomènes rares mais significatifs tels que l’activité électrique au-dessus des orages (par exemple, les sprites) ou de rares cas de conduits de radar. » Le rapport continue, « … le comité d’examen n’était pas convaincu que l’une des preuves impliquait des processus physiques actuellement inconnus ou indiquait l’implication d’une intelligence extraterrestre. » De plus, en écho. La conclusion d’Edward Condon (Condon et Gilmor 1969) écrite en 1968 (« rien n’est venu de l’étude des OVNIS au cours des 21 dernières années qui s’ajoute aux connaissances scientifiques » et « une étude plus approfondie des OVNIS ne peut probablement pas être justifiée dans l’attente que La science progressera ainsi »), le panel a conclu qu’« il est peu probable qu’une analyse plus approfondie des preuves présentées à l’atelier permette d’élucider la cause ou les causes des rapports » présentés par KELE, bien qu’« il existe toujours la possibilité que l’investigation d’un problème inexpliqué Ce phénomène peut conduire à une avancée des connaissances scientifiques » à l’avenir. Bien que cela ne soit pas dit explicitement, l’une des implications de la conclusion du groupe spécial est qu’une analyse plus approfondie d’anciens cas ne serait probablement pas fructueuse. (Je dois souligner que le panel est parvenu à cette conclusion après avoir examiné non seulement les preuves radar et radar-visuelles, mais aussi les preuves photographiques, les preuves d’interférences de véhicules, les effets physiologiques sur les témoins, les blessures à la végétation, l’analyse des débris et des marques au sol.)
Une analyse plus approfondie d’une ancienne observation peut ne pas identifier positivement la cause, mais elle peut montrer qu’il n’y a pas d’explication conventionnelle. S’il y a suffisamment d’informations disponibles pour exclure toutes les causes connues, alors il est légitime de prétendre que l’observation est la preuve d’un phénomène, quelque chose qui n’est pas encore compris par les scientifiques. Malheureusement, le panel n’a pas poussé l’enquête sur l’un des cas assez loin pour déterminer s’il y avait ou non des cas qui ne pouvaient pas être expliqués par des phénomènes conventionnels. Cet article démontre que l’analyse minutieuse de cas anciens peut fournir des preuves de phénomènes inexpliqués, et pourrait donc enrichir les connaissances scientifiques. Les cas considérés dans cet article sont classés comme radar, radar-visuel et photographique.
OVNIS RADAR D’ORIGINE ATMOSPHÉRIQUE
En commentant les détections radar d’objets ou de phénomènes non identifiés le Dr. VonR Eschleman, à l’annexe 4 de l’etude (Sturrock, 1998), écrit qu’il est possible que certains des cas radars présentés au panel ont une explication naturelle. ), Plus précisément, il a suggéré que la « conduite atmosphérique variable dans le temps » du rayonnement électromagnétique pourrait expliquer certaines des observations radar. Il a souligné que les effets atmosphériques peuvent faire apparaître au radar qu’il y a une cible (un réflecteur de rayonnement) là où il y a n’est, en fait, aucune cible. En particulier, la canalisation ou la courbure du rayonnement par l’atmosphère peut faire apparaître au système radar qu’un objet réfléchissant, une cible radar, se trouve à une altitude plus élevée qu’elle ne l’est réellement. Selon Eschleman, » certains des échos obtenus par les radars militaires sont basés sur des retards mesurés et des angles d’élévation mesurés d’arrivée de l’énergie réfléchie par l’objet en écho. Comme présenté, certaines positions cibles ont été tracées en hauteur par rapport au temps. Mais la hauteur est calculée à partir de deux paramètres : (1) le délai mesuré, qui est une très bonne indication de la distance ; et (2) l’angle d’arrivée vertical mesuré, qui peut ne pas être une représentation valide de la direction verticale vers la cible. » L’angle d’arrivée vertical mesuré ne sera pas réellement la direction de la ligne droite vers la cible car la réfraction dans l’atmosphère se plie rayonnement vers le bas lorsqu’il se déplace du radar à la cible, puis revient au radar. Le trajet des rayons courbés forme un arc (convexe vers le haut) au-dessus de la surface de la terre. Lorsqu’un conduit se produit, l’arc est suffisamment courbé pour que les rayons soient émis horizontalement ou vers le haut à un très petit angle d’élévation de sorte qu’ils n’atteindront pas normalement la surface de la Terre sont suffisamment inclinés vers le bas pour éclairer des objets qui se trouveraient normalement sous le faisceau radar, tels que des cibles au sol et des avions volant à basse altitude. rayon transmis et par conséquent le rayonnement d’écho se déplace horizontalement ou légèrement vers le bas lorsqu’il atteint l’antenne Le système radar interprète cela comme l’écho d’un objet au-dessus Plus précisément, écrit Eschleman, « lorsqu’un conduit se produit, des réflexions provenant de cibles de surface distinctes et distantes (bâtiments, ponts, camions, etc.) peuvent être reçues à des angles d’élévation de plusieurs degrés, de sorte qu’une cible au sol à une distance de 100 km , par exemple, pourrait sembler représenter un objet à une hauteur de plusieurs kilomètres. » Si le conduit, qui est un phénomène météorologique, devait changer soudainement, la cible radar pourrait sembler se déplacer vers le haut ou vers le bas selon que la courbure de la arc devrait arriver à augmenter ou à diminuer. Selon Eschleman. « Des turbulences atmosphériques déformeraient le conduit et provoqueraient des changements brusques d’angle de peut-être quelques dixièmes de degré, ce qui pourrait être interprété comme un changement brusque d’altitude de l’ordre d’un demi-kilomètre » pour une cible à 100 km de la station radar.
Si un conduit était créé là où il n’y avait pas de conduit, une cible radar pourrait soudainement apparaître. Inversement, si le conduit devenait soudainement beaucoup plus faible ou cessait complètement, la cible radar disparaîtrait. Ainsi, la discussion d’Eschleman montre comment la réfraction de l’atmosphère pourrait « créer et annihiler » des cibles non identifiées au-dessus du sol qui ne sont vraiment pas là et comment des changements dans l’atmosphère pourraient faire que ces cibles semblent se déplacer de haut en bas Bien que la flexion latérale du rayonnement soit beaucoup plus petite que la flexion verticale , Eschleman souligne que « l’angle d’arrivée horizontal serait également affecté par la turbulence, ajoutant au caractère chaotique de la trajectoire de vol apparente » Cependant, cette flexion latérale serait très faible (centièmes de degré) et pourrait même ne pas être détectée par un radar de recherche typique.
Si un canal était conduit à illuminer un objet en mouvement et au sol ( avion, ballon, etc.) alors le radar afficherait une cible mobile à une certaine altitude où il n’y avait, en fait, aucune cible. Si, également, il y avait des variations dans la flexion verticale du faisceau de réfraction, la cible pourrait apparaître au radar comme si elle changeait d’altitude au fur et à mesure qu’elle se déplaçait. Dans certaines circonstances atmosphériques uniques, il pourrait sembler au système radar que cette cible se déplaçait le long d’une trajectoire inclinée droite vers le haut ou vers le bas.
Bien qu’Eschleman ait discuté de la possibilité que la réfraction atmosphérique puisse expliquer certaines cibles radar non identifiées (OVNIS radar), il n’a pas poussé cette explication jusqu’à sa conclusion logique en démontrant qu’elle expliquerait n’importe quel cas spécifique présenté à l’atelier. L’analyse de l’une des pistes radar les plus surprenantes présentées par von Ludwiger à l’atelier est présentée ci-dessous. L’analyse démontre que la réfraction atmosphérique ne pouvait pas expliquer la hauteur de la cible. Il ne pouvait pas non plus expliquer la vitesse ou la trajectoire linéaire de la cible. Ensuite, cet article présente l’histoire et l’analyse d’une série d’observations inexpliquées qui se sont produites au large des côtes de la Nouvelle-Zélande en décembre 1978 (observations qui n’ont pas été présentées pour discussion lors de l’atelier) et démontre que les phénomènes atmosphériques ne pouvaient pas les expliquer.
TRAJET LINÉAIRE, MACH 3
Le 8 mars 1995, une station radar militaire près de Lucerne. La Suisse, a détecté une série de « cibles » ou « coups » radar anormaux qui, pris ensemble, semblent faire une trace cohérente d’un objet non identifié (Figure 1). C’était l’une des dizaines de cibles, dont certaines non identifiées, qui ont été détectées par le réseau militaire et civil suisse de contrôle du trafic aérien ce jour-là. Ce qui rendait cette piste particulièrement intéressante est que, dans l’espace tridimensionnel, c’était presque une ligne droite descendant d’environ 21,7 km à environ 6,2 km (selon le système radar) tout en s’étendant horizontalement sur une distance d’environ 240 km.

La vitesse était proche de Mach 3, alors que Mach 2 est la limite supérieure de vitesse légalement autorisée pour les avions à hautes performances dans l’espace aérien européen. (Von Ludwiger, 1998).
La première détection a eu lieu alors que la cible se trouvait à environ 430 km de la station radar. Le système radar, qui mesure la hauteur et l’azimut, a calculé une altitude d’environ 21,7 km. Puisque la station radar est à une altitude d’environ 2,1 km, l’angle d’élévation de la cible était à peu près égal à arctan ([21,7-2,1]/430) = 2,90 degrés. La station radar a enregistré 4 « coups radar » à 10 secondes d’intervalle (taux de rotation du faisceau de 6 tr/min) qui constituent le premier segment. Ensuite, le système n’a plus enregistré cet objet. Au cours des 30 secondes de cette deuxième période d’enregistrement, l’objet a diminué d’altitude de 1,9 km de 21,7 à 19,8 km d’altitude (Figure 2). Il a également parcouru environ 28 km jusqu’à un point situé à environ 402 km de la station (Figure 3). À la fin de la piste, l’élévation angulaire était à peu près égale à arctan ([19.8-2,1]/402) = 2,80 degrés. La pente descendante de la piste était d’environ
arctan(1.9/28) = 4.3 degrés. La longueur de la piste a été parcourue en 30 secondes, la vitesse moyenne était donc d’environ 3 360 km/h. Le radar militaire a la capacité de mesurer la composante radiale (vers ou loin du radar) de la vitesse instantanée en mesurant le décalage de fréquence (Doppler) du rayonnement renvoyé. Le radar a mesuré des vitesses de 3 348, 3 358, 3 356 et 3 368 km/h aux quatre détections (voir la figure 2).


Ce sont environ 90% de Mach 3 (environ 3 700 km/h). Étant donné que ces vitesses ont été mesurées le long d’une trajectoire qui déviait de seulement 4 degrés par rapport à la station radar, les vitesses réelles étaient environ 0,2 % supérieures aux valeurs mesurées (1/cos(4) = 1,002).
Le système radar a des « règles » ou des protocoles de fonctionnement qui déterminent quels objets doivent être continuellement suivis ou enregistrés sur l’écran et lesquels doivent être ignorés. Après quelques détections, le système rejette automatiquement les objets qui sont au-dessus d’une certaine altitude, qui se déplacent plus vite que certaines vitesses, qui changent souvent de direction (erratiques) ou qui ont d’autres caractéristiques (certaines classées). Le système a supprimé la trace de cet objet de son registre de cibles après la quatrième position enregistrée. La raison exacte pour laquelle le système a abandonné cet objectif ne peut pas être déterminée à cette date tardive. Cependant, il a probablement laissé tomber la cible parce que sa vitesse et son altitude l’ont mis hors de portée des avions ordinaires (pendant la période de la guerre froide, il aurait pu être suivi en permanence pour être certain qu’il ne s’agissait pas d’un type de missile venant vers la Suisse depuis une haute altitude.).
Aucun autre coup n’a été enregistré pendant 70 secondes. Ensuite, le radar de Lucerne et une autre station radar militaire ont indépendamment détecté ce que le système a interprété comme étant un « nouvel » objet à une distance d’environ 335 km de la station de Lucerne. Chaque radar a enregistré une trace pendant six rotations. Les pistes ne coïncidaient pas exactement Cela ne signifie pas qu’il y avait deux objets voyageant côte à côte, mais plutôt que les deux stations radar n’étaient pas synchronisé pour garantir que les deux radars montreraient exactement la même position d’un objet dans cette zone géographique particulière. Les deux pistes, bien que parallèles et exactement de même longueur, étaient séparées latéralement de quelques kilomètres. Seule l’une des pistes est représentée sur les figures 1 et 3. (Remarque : la détection par une deuxième station radar exclut la possibilité que cette piste ait été causée par un dysfonctionnement électronique du radar de Lucerne) Cette fois, le système a enregistré 6 retours consécutifs, chacun enregistrant une composante de vitesse radiale d’environ 3 360 km/h. La direction vers la station radar était maintenant d’environ 6 degrés à droite de la direction de déplacement, de sorte que les vitesses réelles étaient d’environ 0,4 % supérieures aux valeurs mesurées. Au cours de cette période de 50 secondes, l’altitude a diminué d’environ 15,7 à environ 13,1 km et il a parcouru environ 47 km le long d’une ligne droite avec une pente descendante d’environ 3,5 degrés à une vitesse moyenne d’environ 3 380 km/h. L’élévation angulaire a diminué d’environ 2,6 à environ 2,4 degrés. La carte du système radar (Figure 3) montre que cette deuxième trace était parfaitement alignée avec la première, avec un écart entre les segments d’environ 67 km de long. L’altitude au début du deuxième segment de piste est cohérente avec le taux de diminution de l’altitude tel que projeté vers le bas à partir du premier segment de piste, bien que la pente du deuxième segment de piste soit légèrement inférieure (3,5 degrés, contre 4,3 degrés, Figure 2).
Encore une fois, le système a abandonné la piste. Une minute plus tard, le radar de Lucerne a commencé à enregistrer des coups sur un « nouvel » objet, maintenant à environ 228 km de la station radar. Cette fois, l’objet a été détecté, perdu puis détecté trois fois de plus sur un total de 40 secondes avant d’être largué pour la troisième et dernière fois à une distance d’environ 190 km de la station radar. Le radar a indiqué que l’altitude a diminué d’environ 7,7 km à environ 6,2 km tandis que l’objet a parcouru une distance horizontale d’environ 38 km. La trajectoire avait une pente descendante d’environ 2,5 degrés, une vitesse moyenne d’environ 3 400 km h et des vitesses radiales instantanées allant de 3 338 à 3 326 km h.
L’angle entre le vecteur de vitesse et la direction vers la station radar était d’environ 12 degrés, de sorte que les vitesses instantanées réelles étaient d’environ 2 % supérieures aux vitesses Doppler, c’est-à-dire qu’elles variaient de 3 392 à 3 404 km/h, ce qui correspond à la vitesse moyenne. Ce troisième segment de piste commençait à une distance d’environ 60 km de la fin du précédent et il avait la même direction que les deux précédents (Figure 1 et 3). L’élévation angulaire a commencé à environ 1,6 degrés et a diminué à environ 1,4 degrés. Le graphique de l’altitude en fonction du temps montre que les dernières valeurs d’altitude se situent quelque peu en dessous de la projection linéaire des valeurs d’altitudes des deux segments de voie précédents (Figure 2).
La cohérence de la vitesse et de la direction des trois segments de piste suggère fortement que ce qui a été détecté était un seul objet qui a parcouru environ 240 km pendant une période de temps de 250 secondes, ce qui correspond à une vitesse moyenne globale d’environ 0,96 km/sec ou environ 3 456 km/h. Si, d’autre part, ces traces sont supposées avoir été faites par trois objets à différentes altitudes et différentes distances, alors la corrélation dans la direction du voyage, le taux de descente et la vitesse doit être considérée comme remarquable et la question doit être posée, pourquoi n’ont-ils pas été détectés tous les trois en même temps ?
En supposant que les pistes sont dues à un seul objet, alors sa vitesse pendant le temps entre les deux premiers segments de piste était d’environ 3 446 km/h (67 km en 70 secondes) et pendant le temps entre les deuxième et troisième segments sa vitesse était d’environ 3 600 km/h (60 km en 60 secondes). Ces vitesses sont supérieures de plusieurs pour cent aux vitesses mesurées pendant les segments de voie. Cet objet a également diminué d’altitude de 21,7 à 13,1 km pendant les 150 secondes entre la première détection du premier segment de piste et la dernière détection du deuxième segment de piste à une vitesse moyenne d’environ 57 m/sec. Puis son altitude a diminué de 13,1 km à environ 7,7 km sur les 60 secondes entre les segments 2 et 3 (voir Figure 2) ce qui correspond à un taux de descente accru de 90 m/sec. Son taux de descente final était d’environ 37 m/sec. Ceci suggère que l’objet aurait pu « se stabiliser » après une descente rapide. À la fin de la piste, il roulait à Mach 2,75, bien au-dessus de la vitesse de vol maximale autorisée en Europe, à une altitude de seulement 6,2 km.
Les détections de cet objet soulèvent un certain nombre de questions auxquels, malheureusement, on ne peut pas répondre maintenant.
- (a) pourquoi le système n’a-t-il pas enregistré l’objet avant le premier enregistrement (était-il trop haut ? Était-il trop petit pour être détecté à des distances plus éloignées ?),
- (b) a-t-il été détecté, bien que non présenté sur l’écran radar, pendant les trous dans l’enregistrement.
- (C) pourquoi n’a-t-il jamais repris la cible après la dernière position enregistrée ? (A-t-il diminué d’altitude et s’est-il déplacé sous le faisceau ? L’objet a-t-il tourné sur une trajectoire très différente et a-t-il disparu dans les Alpes suisses ?)
Une explication simple serait que le radar a détecté un avion militaire voyageant considérablement au-dessus de la « limite de vitesse » européenne. « Cela aurait été un avion avec son transpondeur éteint, puisqu’il n’y avait pas de retour « radar secondaire » qui l’aurait identifié positivement. La vitesse est au-delà de ce qui est autorisé sur l’Europe. S’il ne s’agissait pas d’un avion à réaction, il faut alors faire appel aux anomalies ou dysfonctionnements radar conventionnels pour expliquer la trajectoire avant de suggérer des explications plus exotiques. cependant suivons la suggestion d’Eschleman et étudions la possibilité que la réfraction atmosphérique puisse expliquer cette cible anormale.
Chaque section de cette piste radar a deux caractéristiques principales, la vitesse latérale et la décroissance d’altitude.
La question à laquelle il faut répondre est la suivante : les effets de réfraction atmosphérique peuvent-ils expliquer ces caractéristiques ?
Suite à la suggestion d’Eschleman que les variations de la quantité de réfraction atmosphérique pourrait tromper le système radar en signalant un changement de l’altitude d’un objet distant, on peut calculer les changements d’altitude causés par l’atmosphère sur les différentes distances le long de la trajectoire et déterminer s’ils sont proportionnels aux valeurs réellement calculées par le système radar. Le changement d’altitude calculée, dH à un intervalle R est donné par dH= R x de où de est la variation d’angle en radians telle que mesurée par le système radar. Un dixième de degré vaut 0,00174 radians. Ainsi une variation d’angle d’un dixième de degré à la distance de la trace initiale, soit environ 430 km, correspond à une variation de hauteur de dH = R de = 430 (0,00174) = 0,75 km. (La réfraction atmosphérique n’aurait qu’un léger effet sur un calcul différentiel.).
Selon Eschleman, des fluctuations d’angle de plusieurs dixièmes de degré pourraient se produire lorsque la turbulence déforme un canal radar. On pourrait donc s’attendre à ce que l’altitude calculée varie de 2 à 3 km à 430 kilomètres. Le dénivelé calculé est la différence entre les hauteurs initiale et finale données par le radar 21,7- 19,8 = 1,9 km. Ainsi, les effets de la réfraction atmosphérique et de la turbulence pourraient expliquer les variations de la hauteur calculée. Cependant, la réfraction atmosphérique ne peut pas expliquer la hauteur calculée elle-même, 21,7 km, au début de la piste. Autrement dit, on ne peut pas supposer que la station radar a détecté un objet en mouvement au niveau du sol ou juste au-dessus et que l’atmosphère a suffisamment déformé le trajet des rayons. Pour faire apparaître au radar que l’altitude était de 21,7 km. Afin de calculer cette altitude, le système radar a mesuré un certain angle d’arrivée, puis a utilisé une technique standard basée sur une « atmosphère modèle » pour tenir compte (corriger) des effets de la réfraction atmosphérique. Parce que les trajets des rayons sont incurvés (convexes vers le haut), l’angle réel d’arrivée de l’écho de l’objet était plus grand d’une petite quantité que l’angle de « propagation en ligne droite », 2,9 degrés, donné par la portée radar et l’altitude estimée. Si les conditions atmosphériques réelles étaient quelque peu différentes de celles intégrées dans le « calcul de l’atmosphère du modèle », l’angle de propagation en ligne droite pourrait être décalé d’une petite fraction de degré. Par conséquent, le calcul du radar peut avoir été erroné de quelques centaines de mètres à un environ un kilomètre d’altitude, mais pas plus. Même dans des conditions de piégeage (qui ne se produisaient pas à l’époque), l’altitude d’une cible à une élévation angulaire de quelques degrés sera raisonnablement bien calculée. Par conséquent, l’objet devait être loin au-dessus de l’altitude du radar et à ou près de 21,7 km. Le même argument vaut pour les autres segments de piste : la réfraction atmosphérique ne peut pas tenir compte de l’altitude, de sorte que l’objet doit avoir été à une altitude considérable au-dessus du sol pendant chacun des segments.
Bien que les variations de la réfraction atmosphérique puissent expliquer les variations de la hauteur calculée d’un objet à haute altitude, la probabilité est faible à nulle que des fluctuations aléatoires de la réfraction donnerait l’impression que l’altitude diminuait de manière uniforme pendant un segment de piste de 30 secondes ou plus. De plus, il est presque inimaginable que de telles fluctuations aléatoires créent l’apparition de dénivellations corrélées d’un segment à l’autre. On peut donc conclure que la réfraction atmosphérique n’a joué qu’un rôle mineur dans la détermination des altitudes calculées de cet objet.
Les effets de réfraction atmosphérique ne peuvent pas expliquer la composante horizontale de la distance parcourue pendant l’un des segments de piste. Pour comprendre pourquoi il en est ainsi, il est nécessaire d’imaginer une manière dont la distance du trajet radar pourrait changer avec le temps pour donner l’impression d’une cible en mouvement même si l’objet réfléchissant était immobile. Imaginez que la réfraction plie une partie du rayonnement radar vers le bas afin qu’elle soit réfléchie par un objet au niveau du sol au moment où l’écho initial est enregistré par le système radar, la distance sur la trajectoire courbe est d’une certaine valeur. Ensuite, si la courbure de la trajectoire diminue (augmente) modifiant ainsi la longueur totale de la trajectoire (qui est la distance radar), il apparaîtra au radar que la cible s’est déplacée vers (ou s’est éloignée) de l’emplacement du radar (Remarque : une antenne radar émet un faisceau avec une distribution verticale de rayonnement (un faisceau « en éventail ») de sorte qu’il y a toujours un rayonnement radar disponible sur une plage d’angles verticaux qui pourrait suivre n’importe quel chemin courbe vers un objet particulier. Par conséquent, à mesure que la courbure change différentes parties du le faisceau radar peut être réfléchi par la cible.) Si la courbure change rapidement, la cible radar semblera se déplacer rapidement vers ou loin du radar défini selon que la courbure diminue ou augmente. Par conséquent, on pourrait considérer cela comme un mécanisme pour expliquer le déplacement des « ovnis radar ». Cependant, ce mécanisme ne fonctionnera pas car les courbures sont beaucoup trop faibles. Considérons que pour un rayon avec une courbure égale à celle de la terre (rayon de courbure = 1/(6330 km) = 0,000158 radians/km), c’est-à-dire un rayon qui a été piégé par une quantité de réfraction supérieure à la normale, la distance du chemin courbe entre les points avec une séparation en ligne droite de 430 km est de 430,08 km. Si ce rayon devait soudainement « se redresser », le radar indiquerait une diminution de la distance, mais la diminution ne serait que d’environ 80 mètres. Dans la plupart des cas, le rayon de courbure d’un trajet de rayon est supérieur à celui de la Terre, mais même dans les conditions « super-réfractives », lorsque le rayon de courbure est légèrement inférieur à celui de la Terre, la longueur du trajet incurvé ne diffère pas de à plus d’une centaine de mètres du trajet en ligne droite. Par conséquent, il devrait être évident que l’on ne peut pas attribuer des changements de portée radar importants à des variations de la courbure du trajet causées par des variations de la réfraction atmosphérique. Étant donné que la réfraction atmosphérique ne peut pas expliquer la longueur de la piste, elle ne peut pas non plus expliquer la composante horizontale de la vitesse. Il faut donc rejeter des explications telles que la détection anormale d’un bâtiment ou d’un sommet de montagne ou d’un véhicule terrestre en mouvement. Même la détection d’un avion à grande vitesse à basse altitude doit être exclue pour les deux premiers segments de route.
Après avoir épuisé les possibilités d’explication de cette trajectoire comme résultant de la courbure des rayons due à la réfraction atmosphérique, les seules explications conventionnelles restantes à considérer sont les « anges radar ». des cibles non identifiées dans l’atmosphère qui pourraient être n’importe quoi, des oiseaux et des insectes à la « turbulence en air clair » (CAT) et aux inhomogénéités atmosphériques associées. Cependant, ces types de cibles sont de très faibles réflecteurs de rayonnement qui auraient été indétectables à ces distances et ils ne peuvent se déplacer rapidement ou régulièrement sur de longues distances (Sholnick, 1970, 1980).
Étant donné que les phénomènes atmosphériques et les anges ne peuvent pas expliquer la longue piste à grande vitesse de 240 km, la seule possibilité conventionnelle restante est celle proposée à l’origine : un avion à hautes performances enfreignant la règle de vitesse en volant presque directement vers la station radar. Cependant, même cela est discutable car la section transversale d’un jet à grande vitesse vu de face peut être de 2 m (deux mètres carrés) ou moins, ce qui est considérablement inférieur à la section transversale minimale estimée pour la détection radar à 430 km, c’est-à-dire 6 m². (La sensibilité du radar est évaluée à environ 10 m² à 500 km. Compte tenu de la quatrième équation de détection de puissance inverse (Condon and Gillmor, 1969), avec toutes les autres quantités étant constantes, la détection à 430 km nécessiterait une section transversale de près de 6 m² pour la cible. A 2 m² la cible ne pouvait pas être détectée à plus de 350 km environ.) Ainsi, la question se pose de savoir si oui ou non le radar aurait détecté un jet dans ces conditions.
On peut conclure de cette discussion que l’explication du jet à grande vitesse est hautement improbable parce que le radar n’aurait pas détecté le jet aussi loin qu’il l’a fait et parce que les jets ne volent pas à des vitesses aussi élevées au-dessus de l’Europe. Le fait que la piste ait fini par ne jamais être récupérée plaide également contre un avion normal puisqu’il n’y avait pas d’autre endroit pour atterrir dans les environs qu’à Genève et, si un avion s’y était posé, il aurait été suivi alors qu’il ralentissait et changerait de cap pour se diriger vers l’aéroport en survolant les montagnes au sud de Genève, Cette piste reste inexpliquée.
OBSERVATIONS EN NOUVELLE-ZÉLANDE, 31 DÉCEMBRE 1978
[Ndlr: ici est développé un complément important d’une partie déjà développée, ici ]
Plusieurs des observations radar et radar-visuelles non militaires les mieux documentées ont eu lieu au large de la côte est de l’île du Sud de la Nouvelle-Zélande au cours de la matinée du 31 décembre 1978. L’histoire de ces observations a été documentée en détail dans plusieurs articles de recherche (Maccabee, 1979a ; Maccabee, 1979b ; Maccabee, 1980 ; Maccabee, 1987) et livres (Fogarty, 1982 ; Startup et Illingworth, 1980). Cependant, l’analyse radar présentée ici n’a pas été publiée auparavant. Ces observations sont particulièrement intéressantes parce que les données atmosphériques de haute altitude d’une ascension en ballon n’ont été obtenues qu’environ une heure et demie avant les observations et parce que le technicien radar responsable de l’entretien du radar a vérifié le système radar et a également vérifié les signes de propagation anormale (réfraction flexion du faisceau) pendant les observations. Les données du ballon de haute atmosphère (température, humidité) et les tests effectués par le technicien radar montrent que la réfraction atmosphérique ne pouvait pas expliquer les cibles radar intéressantes, même si les sceptiques ont affirmé que toutes les cibles radar anormales étaient le résultat d’effets atmosphériques.
Ces observations sont probablement uniques dans l’histoire du sujet OVNI dans la mesure où l’un des passagers de l’avion, un journaliste de la télévision, a enregistré, lors des observations, ses impressions de lumières qui semblaient être associées à une série de détections radar. Il y avait également un enregistrement des conversations du pilote avec le contrôleur de la circulation aérienne au centre de contrôle de la circulation aérienne de Wellington (WATCC). Les informations à présenter sont basées sur l’enquête sur place de cet auteur en janvier et février 1979, des entretiens avec tous les témoins, l’analyse du film original et des enregistrements sur bande. informations radar fournies par le technicien radar et le contrôleur de la circulation aérienne et sur mon analyse ultérieure de ces événements.
Ces événements se sont produits entre environ 0010 heures (00h10) et 0100 (01h00) heure locale (heure d’été). Pendant ce temps, l’avion, un cargo à moteur Argosy 4. a volé vers le sud de Wellington à Christchurch. La trajectoire de vol du radeau est illustrée sur la figure 4 avec les temps de divers événements à décrire. (Il y a eu une deuxième série d’événements qui étaient visuellement et photographiquement plus impressionnants que ceux discutés ici alors que l’avion volait vers le nord le long de la même trajectoire entre environ 0200 (02h00) et 0300 heures. Deux de ces événements ont été discutés dans profondeur (voir Maccabee, 1979, 1980 et 1987)).
Les témoins à bord de l’avion étaient le capitaine (pilote) avec 23 ans d’expérience et 14 000 heures de vol (Bill Startup), le copilote avec 7 000 heures de vol (Robert Guard) et une équipe d’information télévisée composée d’un reporter (Quentin Fogarty), un caméraman (David Crockett) et un preneur de son (Ngaire Crockett, la femme de David). Il s’agissait d’un vol de transport de journaux de routine, de Wellington à Christchurch, effectué par un équipage qui connaissait très bien le vol de nuit au large de la côte est de l’île du Sud. Le seul aspect non routinier du vol était la présence d’une équipe de télévision ou à bord de l’avion. L’équipe de télévision était à bord en raison d’une série d’observations d’OVNI dans la même zone dix jours plus tôt. Au cours de la nuit du 21 décembre, il y avait eu une série d’observations radar et visuelles le long de la côte est de l’île du Sud. Les témoins de ces événements étaient des équipages aériens et des contrôleurs radar. Ces observations avaient attiré l’attention d’une chaîne de télévision à Melbourne, en Australie, et le directeur de la station avait décidé de faire un court documentaire à leur sujet. (Remarque : la disparition du jeune pilote Frederick Yalentich au-dessus du détroit de Bass au sud de Melboume alors qu’il décrivait un objet brillant non identifié au-dessus de son avion (Haines, 1987)

avait suscité un immense intérêt mondial en octobre 1978. La chaîne de télévision essayait de capitaliser sur l’intérêt résiduel pour les observations d’OVNI qui avaient été générés par la disparition de Valentich. La disparition de Valentich 15 reste un mystère.) Un journaliste employé par cette station de télévision, Quentin Fogarty, était en vacances en Nouvelle-Zélande, alors la station lui a demandé de préparer un court documentaire sur les observations du 21 décembre. Fogarty a embauché un çameraman et un preneur de son et a interviewé les contrôleurs radar et un pilote qui ont été témoins des observations précédentes. Il s’est également arrangé pour voler sur l’un des vols nocturnes des journaux afin d’obtenir des images de fond pour son documentaire. Naturellement, il ne s’attendait pas à voir quoi que ce soit et il n’était pas préparé à ce qui s’est passé. Personne d’autre non plus !
Les témoins des cibles détectées par le radar du Wellington Air Traffic Control Center (WATCC) étaient le contrôleur aérien (Geoffrey Causer) et, pour une partie du temps, le technicien de maintenance radar (Bryan Chalmers).
Il est important de comprendre le contexte géographique, atmosphérique et radar de ces observations afin d’évaluer correctement l’événement radar particulier qui nous intéresse ici. L’île du sud de la Nouvelle-Zélande est assez accidentée, avec des sommets montagneux. dans toute l’île avec des altitudes de 5.000 à 12.000 A (Mt Cook) Le vent dominant de l’ouest perd son humidité lorsqu’il passe au-dessus de ces sommets et devient quelque peu turbulent et sec au moment où il passe la côte est de l’île (le so- appelée « Kaikoura Coast ») et se dirige vers le sud de l’océan Pacifique. Dans ces conditions de vent « Foehn », il y a de l’air océanique humide sous l’air sec d’altitude supérieure. La vitesse de rayonnement radar diminue (la réfractivité augmente) avec l’augmentation de l’humidité dans l’air, de sorte que la réfraction est plus grande à des altitudes plus basses dans les mêmes conditions. Il est donc courant d’avoir une flexion atmosphérique supérieure à la normale dans les conditions de Foehn.
Les ensembles de radars de recherche utilisés pour surveiller le trafic aérien sur des distances de cent milles ou plus utilisent des antennes qui créent des faisceaux en éventail verticaux. (Remarque : pour être cohérent avec les déclarations enregistrées du contrôleur de la circulation aérienne, toutes les altitudes et vitesses toutes les distances sont en pieds ou miles nautiques, nm, sauf indication contraire 1 nm = 6077 ft = 1852 km.) Le radar de Wellington, avec une longueur d’onde de 51 cm (587 MHz), utilisait une antenne avec une ouverture de 16 m de long sur 4,3 m de large qui a la forme d’un cylindre parabolique quelque peu déformé avec l’axe du cylindre horizontal. Une antenne crée un faisceau large dans le sens vertical et étroit dans le sens horizontal. Cette antenne aurait un diagramme de rayonnement d’environ 2,1 degrés de large dans le plan horizontal et le lobe principal du bélier aurait une hauteur d’environ 8 degrés dans un plan vertical (Skolnik, 1980). (Le diagramme de rayonnement vertical est plus compliqué que cela, cependant, étant approximativement une forme carré cosécante; voir l’illustration au bas de la figure 5.) Le centre du lobe principal est incliné vers le haut de 4 degrés mais il y a une puissance substantielle rayonnée à angles inférieurs à 4 degrés. C’est ce rayonnement d’angle inférieur qui peut être courbé vers le bas pour toucher le sol ou l’océan. conditions, le radar peut détecter la terre sur la partie nord de la côte est de l’île du Sud à des distances d’environ 50 nm. Dans les conditions de Foehn de propagation anormale, le radar peut détecter des réflexions au sol à de plus grandes distances car une plus grande partie de la partie du faisceau en éventail en dessous de 4 degrés d’élévation est courbée vers le bas. Dans des conditions « vraiment mauvaises », le radar peut détecter la péninsule de Banks à environ 160 nm de Wellington En plus de détecter la côte, le radar peut également détecter les navires au sud de Wellington. Le radar ne détecte cependant pas l’océan lui-même, sauf peut-être à de très courtes distances de l’installation radar.
Afin d’éliminer les cibles au sol qui n’intéressent pas les contrôleurs aériens, le système radar fonctionne généralement en mode « MTI » (indicateur de cible mobile) dans lequel un circuit électronique spécial supprime de l’affichage radar tous les réflecteurs qui se déplacent à un vitesse inférieure à environ 15 nm/h.

En mode MTI, le radar affichera les navires en mouvement mais pas à l’arrêt et il n’affichera pas la plupart des réflexions de la terre. Cependant, le MTI peut être « trompé » par des réflecteurs qui sont capables de changer la fréquence ou la phase du signal radar même s’ils sont nominalement stationnaires. En effet, le fonctionnement MTI est basé sur le phénomène Doppler mentionné précédemment : les objets en mouvement modifient la fréquence et la phase du rayonnement réfléchi. Avec le traitement MTI, le radar n’affiche que les réflexions pour lesquelles la fréquence d’écho est différente de la fréquence transmise Les changements de fréquence peuvent être causés par une pièce mobile sur un objet nominalement stationnaire, le balancement d’un bateau, etc. Un réflecteur qui ne bouge pas mais qui change rapidement sa réflectivité, comme une plaque plate rotative ou un objet qui rétrécit et se dilate en réflectivité ou en « section transversale » radar, pourrait moduler le rayonnement réfléchi et également « échapper » à l’électronique du filtre MTI. Parfois, même le balayage du faisceau radar sur une grande cible telle que le sol peut moduler suffisamment le rayonnement renvoyé pour tromper le MTI.
HISTORIQUE DES OBSERVATIONS
Afin de bien comprendre l’importance de l’événement radar (#16 ci-dessous) à discuter, il est nécessaire de connaître les événements qui ont conduit à cet événement. Un historique des divers événements d’observation représentés par les nombres sur la figure va maintenant. be.guen Au point (1) l’avion est passé au-dessus de Wellington vers minuit. Il a atteint un point de compte rendu non géographique juste à l’est du cap Campbell à environ 10 minutes après minuit (point 2 sur la carte de l’événement) où l’avion a fait un virage à gauche pour éviter toute turbulence possible du vent soufflant sur les montagnes de l’île du Sud. FIGURE 4
Cette turbulence avait été prédite par le service météorologique de vol, mais n’a pas été détecté du tout pendant le voyage. Le commandant de bord a signalé que les conditions de vol étaient excellentes et qu’il a pu utiliser le verrouillage automatique de la hauteur, qui se serait automatiquement désengagé s’il y avait eu des turbulences qui auraient modifié l’altitude du radeau aérien. L’état du ciel était « CAVU » (clair et visibilité illimitée) avec une visibilité estimée à plus de 30 milles. (Remarque : la définition de la visibilité est basée sur la réduction du contraste entre un objet sombre éloigné et un ciel clair. Ainsi, un objet noir pourrait à peine être vu contre un ciel clair à 30 miles. Cependant, une lumière pourrait être vue dans le ciel nocturne depuis une centaine de kilomètres ou plus, cela dépendra de son intensité intrinsèque.) L’équipage pouvait voir les lumières le long de la côte de l’île du Sud, s’étendant vers le sud jusqu’à Christchurch à environ 150 milles.
Vers 0 h 05 (00 h 05, heure locale), le commandant de bord et le copilote ont remarqué pour la première fois des lumières au comportement étrange devant eux près de la côte de Kaikoura. Ils avaient emprunté cette route plusieurs fois auparavant et connaissaient parfaitement les feux le long de la côte, ils ont donc rapidement réalisé qu’il ne s’agissait pas de feux côtiers ordinaires. Ces lumières apparaissaient, projetaient un faisceau vers le bas vers la mer, puis disparaissaient, pour réapparaître à un autre endroit. Parfois il n’y en avait qu’un, parfois aucun et parfois plusieurs. Après plusieurs minutes à observer et à ne pas identifier les lumières, le pilote et le copilote ont commencé à discuter de ce qu’ils voyaient. Ils étaient intrigués par leur incapacité à identifier ces lumières inhabituelles et leur étrange schéma d’activité, ce qui a fait penser au capitaine à une opération de recherche. (Une activité similaire de lumières non identifiées près de CapeCampbell avait été vue par des témoins au sol lors d’une série d’événements OVNI qui s’étaient produits environ dix jours plus tôt. Voir Startup et Illingworth, 1980)
Vers 0012, ils ont décidé de contacter le contrôle du trafic aérien de Wellington. Radar central pour savoir s’il y avait des avions près de Kaikoura A ce moment, point (3) sur la carte, l’avion volait à la vitesse indiquée de 215 nm/h et avait atteint son altitude de croisière de 14 000 pieds. Il y avait un léger vent d’ouest. La vitesse au sol moyenne était d’environ 180 nm/h ou d’environ 3 nm/minute. Étant donné que le copilote contrôlait l’avion lors de ce voyage particulier, le commandant de bord s’est chargé de communiquer avec le WATCC. « Avez-vous des cibles visibles sur la chaîne de la péninsule de Kaikoura ? » Il a demandé. Le contrôleur du WATCC avait été occupé par un autre aéronef à atterrir, mais avait remarqué des cibles apparaissant et disparaissant dans cette direction pendant une demi-heure ou plus. Il savait qu’il n’était pas rare de trouver de fausses cibles radar près de la côte de l’île du Sud. Il s’agirait d’effets d’encombrement au sol d’une légère réfraction atmosphérique, il n’y avait donc prêté que peu d’attention. Environ 20 secondes après que l’avion a appelé, il a répondu : « Il y a des cibles dans votre position à une heure à, euh, 13 milles, apparaissant et disparaissant. À l’heure actuelle, elles ne s’affichent pas mais elles l’étaient il y a environ 1 minute. » (Remarque : les directions par rapport à l’avion sont données en « heure d’horloge » avec 12h00 – midi – étant directement devant l’avion, 6h00 étant directement derrière, 9h00 à gauche et 3h00 à droite La « position 1:00 » est à 30(+i-)15 degrés vers la droite.) Le pilote a répondu : « Si vous en avez l’occasion, voudriez-vous garder un œil sur eux ? » « Certainement », fut la réponse. Peu de temps après, l’autre avion atterrit et à partir de ce moment, l’Argosy fut le seul avion dans le ciel au sud de Wellington.
Vers 0 h 15 (point 4), le WATCC a signalé une cible à la position 3 h 00 sur la côte. Selon le capitaine (7), à peu près à ce moment-là, l’équipe de télévision, qui était sous le pont dans la soute de l’avion pour filmer une courte discussion sur les observations précédentes, arrivait sur le pont d’envol. L’équipage de l’air a signalé à l’équipe de télévision les lumières inhabituelles et les lumières ordinaires visibles à travers le pare-brise. Le erew n’a pas vu la cible à 3h00.
L’équipe de télévision a dû s’adapter aux conditions difficiles de travail sur le poste de pilotage exigu et très bruyant. Le caméraman devait tenir sa grande pellicule électrique Bolex 16 mm avec avec son objectif zoom 100 mm et son grand magasin de film sur son épaule alors qu’il était assis dans une petite chaise entre le pilote (capitaine) à sa gauche et le copilote à sa droite De cette position, il pouvait facilement filmer l’avant de l’avion mais il lui était difficile de filmer loin à droite ou à gauche et, bien sûr, il ne pouvait rien filmer derrière l’avion. On lui a donné des écouteurs pour qu’il puisse entendre les communications entre l’équipage et le WATCC. De temps en temps, il criait par-dessus le bruit de l’avion au journaliste, qui se tenait juste derrière le copilote, pour dire au journaliste ce que l’aiLCIew entendait du WATCC. La preneuse de son était accroupie derrière le caméraman avec son magnétophone par terre et ses écouteurs. Elle n’a rien pu voir. Elle pouvait, bien sûr, entendre le journaliste tandis qu’il enregistrait ses impressions sur ce qu’il avait vu par la fenêtre latérale droite ou par les fenêtres avant du poste de pilotage. Elle a entendu des choses qui étaient plus qu’un peu effrayantes.
Vers 00 h 16, la première observation radar-visuelle s’est produite. Le WATCC a restitué « La cible vous est apparue brièvement à 12h00 à 10 milles », ce à quoi le capitaine a répondu « Merci ». (La cible précédente à 3h00 avait disparu.) Selon le capitaine (7), il a regardé devant l’Argosy et a vu une lumière là où il n’aurait dû y en avoir (ils regardaient généralement vers l’océan ouvert ; l’Antarctique, la terre la plus proche dans la direction d’observation, se trouvait à environ 1 000 milles ; il n’y avait aucun autre aéronef dans la région). Il l’a décrit comme suit : « Il était blanc et pas très brillant et il n’a pas changé de couleur ni de scintillement. Pour moi, il ressemblait au feu arrière d’un avion. Je ne sais pas depuis combien de temps nous l’avons vu. Probablement pas très longtemps. Je n’ai pas eu l’occasion de juger de sa hauteur par rapport à l’avion. » Cette cible n’a pas été détectée lors du balayage suivant de l’oscilloscope. (Remarque: chaque balayage nécessitait 12 secondes correspondant à 5 tours par minute.).
Environ 20 secondes plus tard, vers 00 16 : 30, le WATCC a signalé un « objectif fort affiché à 11 :00 à 3 milles ». Le capitaine a répondu « Merci, pas encore de contact. » Quatre rotations radar (48 secondes) plus tard (au point 7), le WATCC a signalé une cible « juste à gauche de 9h00 à 2 milles ». Le capitaine a regardé par sa fenêtre gauche mais n’a rien vu dans cette direction sauf des étoiles. Quatre-vingt-cinq secondes plus tard, vers 00 h 19, le WATCC a signalé la cible à 10 h 00 à 12 milles. Encore une fois, il n’y a pas eu d’observation visuelle. Le commandant de bord a écrit (7) qu’il a eu l’impression à partir de cette série de cibles qu’un objet qui était initialement devant son avion avait dépassé le côté gauche. Il a décidé de faire une orbite (tournant à 360 degrés) pour savoir s’ils pouvaient voir quoi que ce soit sur leur côté gauche ou derrière.
Vers 0 h 20 min 30 s, le commandant de bord a demandé la permission de faire une orbite à gauche. Le WATCC a répondu que c’était OK de le faire et a signalé « qu’il y a une autre cible qui vient d’apparaître sur votre gauche à environ 1 mile brièvement puis qui disparaît à nouveau. » Une autre cible de balayage unique. Le capitaine a répondu: « Nous ne l’avons pas encore en vue, mais nous captons les lumières autour de Kaikoura. » En d’autres termes, l’équipage voyait toujours des lumières anormales près de la côte.
A ce moment, l’avion se trouvait à environ 66 milles de la station radar. A cette distance, la largeur de faisceau horizontale de 2,1 degrés (aux points de demi-intensité) aurait été d’environ 2 milles de large (aux points de demi-puissance sur le diagramme de rayonnement). L’écran radar affiche un arc court lorsqu’il reçoit le rayonnement réfléchi d’un objet, tel qu’un avion, c’est-à-dire beaucoup, beaucoup plus petit que la distance à l’objet (une cible « ponctuelle »). La longueur de l’arc correspond à peu près à la largeur angulaire du faisceau. Ainsi, dans ce cas, les longueurs de l’arc faites par l’avion et l’inconnu équivalaient chacune à environ 2 milles. Si le contrôleur pouvait réellement voir un espacement de 1 mile entre les arcs, alors les centres des arcs, représentant les positions des cibles réelles (avion et inconnue) étaient distants d’environ 2 + 1 = 3 miles.
Alors que l’avion tournait à gauche pour faire le tour en un cercle, qui prendrait environ 2 minutes à compléter (point 9), WATCC a rapporté « La cible que j’ai mentionnée il y a un instant est encore à environ 5h00 de vous, stationnaire.
Pendant le virage, l’équipage et les passagers pourraient, bien sûr , ont vu les lumières de Wellington et les lumières tout le long de la côte depuis les environs de Kaikoura jusqu’à Christhurch et ils ont pu voir les lumières anormales près de Kaikoura, mais ils n’ont rien vu qui semblait être associé aux cibles radar qui se trouvaient à proximité de l’avion.
Pendant ce laps de temps, le contrôleur du WATCC a remarqué que des cibles continuaient d’apparaître pendant un ou deux balayages du radar, puis disparaissaient près de la côte de Kaikoura. Cependant, il ne les a pas signalées à l’avion. Il n’a signalé que les cibles. qui ch apparaissaient près de l’avion, maintenant à environ 25 milles de la côte. Le journaliste de télévision, qui a pu observer le ciel en permanence, a déclaré (8) qu’il voyait continuellement des lumières anormales « au-dessus de Kaikoura », c’est-à-dire qu’elles semblaient être plus hautes que les lumières le long de la côte de la ville de Kaikoura.
En 0027 (point 10) l’avion se dirigeait vers le sud le long de sa trajectoire d’origine WATCC a rapporté « La cible est à 12h00 à 3 miles. » Le capitaine a immédiatement répondu : « Merci. Nous le récupérons. Il y a une lumière clignotante. » Le commandant de bord a rapporté avoir vu « quelques lumières bleu-blanc très brillantes, clignotant régulièrement à un rythme rapide. Elles ressemblaient aux lumières stroboscopiques d’un Boeing 737.. » (Startup et Illingworth, 1980)). À ce moment, il regardait de nouveau vers l’océan ouvert.
A partir du moment où il s’est assis sur le pont d’envol, le caméraman a eu du mal à filmer. Les lumières d’intérêt étaient pour la plupart à droite de l’avion et, en raison de la taille de sa çamera, il n’a pas pu les filmer sans coller l’objectif de sa caméra devant le copilote qui commandait l’avion. Lorsqu’une lumière apparaissait près de Kaikoura, il tournait la caméra vers elle et essayait de la voir à travers son grand objectif. Généralement, au moment où l’appareil photo était pointé dans la bonne direction, la lumière s’éteignait. Il était également réticent à filmer parce que les lumières étaient toutes si faibles qu’il pouvait à peine les voir à travers l’objectif et il ne croyait pas qu’il obtiendrait des images. Bien sûr, il n’avait pas l’habitude de tourner dans ces conditions difficiles.
Néanmoins, le caméraman a bien obtenu quelques images de films de lumières non identifiées. Il a également filmé des lumières connues. Il a filmé le décollage de Wellington, fournissant ainsi des images de référence. L’image suivante sur le film, prise à un moment non enregistré après le décollage de Wellington, est l’image d’une lumière bleu-blanc sur un fond noir. Afin de documenter le fait qu’il était assis dans le radeau au moment de ce tournage, il a tourné la caméra rapidement vers la gauche et a filmé quelques-unes des faibles lumières rouges des compteurs sur le tableau de bord Malheureusement, le caméraman ne s’est pas rappelé, lors de l’interview plusieurs semaines plus tard, exactement quand cette lumière blanche bleue a été filmée, il ne se souvenait pas non plus exactement où la caméra était pointée à ce moment-là, bien qu’elle soit clairement un peu à droite de tout droit. L’image initiale de la lumière est suivie de deux autres mais il n’y a pas de points de référence pour ces lumières. Ils auraient pu être à droite ou tout droit ou à gauche. Les durées des trois apparitions d’une lumière bleu-blanc sont de 5, 13 et 1,9 secondes, ce qui pourrait être interprété comme une impulsion lente. Après cette dernière image bleu-blanc, le film montre environ 5 secondes d’images très sombres qui semblent être le rivage éloigné de Kaikoura avec quelques lumières plus brillantes au-dessus du rivage. Malheureusement, ces images sont si sombres qu’elles rendent l’analyse presque impossible.
Bien qu’il soit impossible de prouver, il se peut que le caméraman ait filmé la lumière clignotante à 0027. Malheureusement, la caméra n’était pas synchronisée avec le magnétophone WATCC ou le magnétophone de l’avion, donc les temps des images du film doivent être déduits pour faire correspondre les descriptions verbales avec les images du film. Le caméraman n’a pas filmé la lumière fixe qui est apparue devant l’avion à 0016.
Peu importe si ces images bleu blanc ont été faites par la lumière clignotante à 0027 ou par une autre apparition d’une lumière bleu-blanc, le fait est, compte tenu de l’endroit où le. avion était à l’époque, que ce film était « impossible » à obtenir du point de vue scientifique conventionnel car il n’y avait rien près de l’avion qui aurait pu réduire ces impulsions lumineuses lumineuses. Les seules lumières sur le pont d’envol à ce moment-là étaient des lumières de compteur rouges faibles parce que le commandant de bord avait éteint toutes les lumières sauf celles qui étaient absolument nécessaires pour surveiller les performances de l’avion. Il n’y avait pas de lumières bleu-blanc internes à refléter par le verre du pare-brise, ni de lumières bleu-blanc à l’extérieur de l’avion Les seules autres sources de lumière possibles, les étoiles, les planètes et les lumières côtières étaient trop faibles et trop éloignées , d’avoir rendu des images aussi lumineuses que ces trois flashs sur la pellicule. Ces images restent inexpliquées.
Il existe un problème similaire pour déterminer exactement quand les déclarations du journaliste sur bande audio ont été faites puisque son enregistreur n’était pas synchronisé avec la bande WATCC. Par conséquent, le moment des déclarations du journaliste doit être déduit de la séquence des déclarations sur la bande et du contenu. les enregistrements attestent à ce moment la mention de lumières vues dans la direction de la cote de Kaikoura, ce qui confirme bien sur la vue des lumières normales de la cote. Mais ensuite, le journaliste a enregistré la déclaration suivante. « Maintenant, nous avons un couple juste en face de nous, très, très brillant. C’était plus une lumière orangée. Il a clignoté puis s’est éteint à nouveau. Nous avons un ferme converti ici en ce moment. Apparemment, il a subi une « conversion sur le champ de bataille » d’être un sceptique d’OVNI à un croyant.
La probabilité est élevée, bien que l’on ne soit pas absolument certain, que l’équipage, le journaliste et le caméraman aient tous vu et enregistré sur bande et filmé l’apparition de la lumière à 3 milles devant l’avion Si c’est vrai, alors cela pourrait avoir été une observation photographique visuelle radar (Une observation photographique visuelle radar s’est produite environ une heure plus tard alors que l’avion volait vers le nord depuis Christchurch.)
Aussi impressionnant qu’ait été cet événement, l’événement radar/visuel le plus intéressant ici était encore à venir. Vers 0 h 28 (point 11), l’avion Argosy a effectué un virage à droite de 30 degrés pour se diriger directement vers Christchurch. Le WATCC a rapporté que toutes les cibles radar étaient maintenant à 12 à 15 milles derrière eux.
Puis vers 0029 (point 12 sur la carte) WATCC a signalé une cible à 1 mile derrière l’avion. Environ 50 secondes plus tard (après 4 balayages du faisceau radar), il a signalé une cible à environ 4 milles derrière l’avion. Puis cette cible a disparu et environ 30 secondes plus tard, il a signalé une cible à 3h00 à 4 milles. Deux balayages du radar se sont produits plus tard, il a vu quelque chose de très proche. Il a rapporté : » Il y a une cible puissante juste en formation avec vous. Peut être à droite ou à gauche. Votre cible a doublé de taille.
L’état extraordinaire d’une » cible de taille double » (DST) a persisté pendant au moins 36 secondes. Cette durée est déduite du temps qui s’est écoulé entre la déclaration du contrôleur à l’avion, faite quelques secondes seulement après qu’il a vu le DST pour la première fois, et sa déclaration que la cible de l’avion s’était réduite à sa taille normale. Cette durée était d’environ 51 secondes (quatre détections radar sur une période de 36 secondes suivies d’une cinquième révolution sans détection plus 3 secondes) selon l’enregistrement sur bande WATCC des événements. Les aspects radar de cet événement DST seront discutés plus en détail ci-dessous.
Le pilote et le copilote et le çameraman ont pu entendre les communications du WATCC. Le journaliste et le preneur de son ne pouvaient pas entendre les communications du WATCC, mais le caméraman criait parfois (fort y à cause du bruit extrême du moteur) au journaliste ce qu’il a entendu du WATCC. Le caméraman a dit au journaliste que la cible volait en formation et le journaliste a commencé à regarder par la fenêtre latérale droite pour la cible. Le copilote regardait aussi et après quelques secondes il aperçoit une lumière qu’il décrit comme suit : « C’était comme les feux de navigation fixes d’un petit avion quand on vous croise la nuit. C’était beaucoup plus petit que les très grands que nous avions vus. au-dessus de Kaikoura. À intervalles irréguliers, il a semblé clignoter, mais il ne s’est pas allumé et éteint, il s’est éclairci ou peut-être a scintillé sur les bords. Quand il a fait cela, je pouvais voir la couleur, une légère teinte de vert ou peut-être de rouge. C’est très difficile de décrire une petite lumière que l’on voit la nuit. »
Le commandant de bord avait regardé dans tout son champ de vision directement devant, vers la gauche vers le haut et vers le bas pour voir s’il pouvait y avoir une source de lumière près de l’avion. Il n’a rien vu d’autre que des feux côtiers normaux et, loin à l’horizon à gauche à l’est), les lumières de la flotte japonaise de pêche au calmar qui utilise des lumières extrêmement brillantes pour attirer les calmars à la surface afin qu’ils soient capturés. Ni le capitaine ni le copilote n’ont vu de feux de circulation sur les navires à proximité d’eux ou près de la côte de l’île du Sud, ce qui implique qu’il n’y avait aucun navire sur l’océan à proximité.
Lorsque le copilote a signalé avoir vu une lumière à droite, le capitaine s’est éteint. les feux de navigation, dont l’un est un feu vert continu sur l’aile droite, afin que le journaliste ne le confonde pas avec un autre feu. Il y avait des lumières le long de la côte mais les lumières de la ville de Kaikoura n’étaient plus visibles, cachées derrière les montagnes qui courent le long de la péninsule de Kaikoura. Ireland (1979) a suggéré que les témoins ont vu une balise à l’extrémité orientale de la péninsule de Kaikouta. Cette balise est visible des navires à une distance de 14 milles de la côte. Il clignote en blanc deux fois toutes les 15 secondes (allumé pendant 2 secondes, éteint pendant 1 seconde, allumé pendant 2 secondes et éteint pendant 10 secondes). L’avion se trouvait à environ 20 milles de la balise et à un angle d’élévation d’environ 7 degrés, ce qui le plaçait au-dessus de l’axe du lobe de rayonnement principal de la balise. La combinaison de la distance et de l’angle hors axe signifie qu’il aurait été à peine visible, voire pas du tout. De plus, la lumière vue par le copilote et les autres semblait être à peu près « au niveau » de l’emplacement du feu de navigation au bout de l’aile qui, à son tour, était à peu près au niveau du cockpit, ou peut-être un peu au-dessus depuis l’avion portait une lourde charge. La lumière était donc à une altitude comparable à celle de l’avion et certainement au-dessus du sol. Plusieurs mois plus tard, à ma demande, l’équipage a tenté de voir la balise de Kaikoura tout en volant le long de la même trajectoire de vol standard de Kaikoura East à Christchurch. Sachant où chercher la balise, ils regardèrent attentivement. Ils ont rapporté n’avoir vu que quelques éclairs au cours des nombreux trajets qu’ils ont effectués devant le phare. Le copilote a déclaré très explicitement que la lumière inhabituelle qu’il a vue n’était pas le phare.
Pendant ce temps, le journaliste a également vu la lumière et a enregistré son impression : « Je regarde vers la droite de l’avion et nous avons un objet confirmé par le radar de Wellington. Il nous suit depuis un bon moment. Il est à environ 4 miles et il ressemble à une étoile très faible, mais elle émet ensuite une lumière blanche et verte brillante. » Malheureusement, la lumière était trop à droite pour que le caméraman puisse la filmer (il aurait dû s’asseoir dans le siège du copilote pour le faire). Le commandant de bord a pu apercevoir brièvement cette lumière que le copilote avait repérée. Cet événement était une observation radar-visuelle avec plusieurs témoins de la lumière.
Environ 82 secondes après que Wellington ait signalé que le DST avait été réduit à la taille normale lorsque l’avion était approximativement au point 17, le commandant de bord a déclaré au WATCC : « Vous avez une cible à 3h00. juste derrière nous. » à quoi WATCC a répondu immédiatement, « Roger, et faire le tour à 4h00 à 4 milles. » Cela semble être une confirmation radar de la lumière que l’équipage a vue sur le côté droit. Cinquante secondes après avoir signalé la cible qui tournait vers 4h00 à 4 milles, l’opérateur du WATCC était en communication avec le centre de contrôle du trafic aérien de Christchurch. Il a dit au contrôleur aérien qu’il y avait une cible à 5h00 à environ 10 miles Il a dit que la cible allait et venait mais « .ne bougeait pas, pas trop de vitesse et quelques secondes plus tard, « Elle se déplace vers l’est maintenant. » Le radar de Christchurch n’a pas montré de cible à cet endroit. Cela pourrait être dû au fait que le radar de Christchurch n’était pas aussi sensible que le radar de Wellington, parce que la section efficace du radar (réflectivité) dans la direction de Christchurch était faible (la section transversale peut changer radicalement avec l’orientation d’un objet) ou parce que la cible peut avoir été en dessous du faisceau radar de Christchurch, qui a une limite d’élévation angulaire inférieure d’environ 4 degrés.
Vers 00h35, alors que l’avion se trouvait à peu près au point 18, le WATCC a contacté l’avion et a demandé : « La cible que vous avez mentionnée, la dernière que nous avons mentionnée à 5:00 à 4 milles auparavant, avez-vous vu quelque chose ? » Le capitaine a répondu : « Nous avons vu celui-là. Il est apparu à 4h00, je pense, à environ 4 milles de distance », ce à quoi le WATCC a répondu : « Roger, cette cible est toujours stationnaire. Il est maintenant 6h00 pour vous à environ 15 milles et elle a été rejointe par deux autres cibles. » Le journaliste a entendu cette information du caméraman et a enregistré le message suivant : « Cette autre cible qui nous suivait a été rejointe par deux autres des cibles, donc à ce stade, nous avons trois objets volants non identifiés juste à côté de notre aile droite et l’un d’eux nous suit maintenant depuis probablement environ 10 minutes. » Malheureusement, comme déjà mentionné, le journaliste n’a pas pu entendre les communications avec WATCC pas toujours la bonne information. Ces cibles se trouvaient derrière l’avion et l’une d’entre elles « suivait » l’avion depuis 7-8 minutes.
Ensuite, le WATCC a signalé que les trois cibles avaient été remplacées par une cible unique. Le commandant de bord, s’interrogeant sur toute cette activité sur ses arrières, demanda une deuxième orbite de deux minutes. Celle-ci fut effectuée vers 0036 30 (point 19). Rien ne fut vu et l’unique cible disparut. Dès lors l’avion se dirigea directement vers Christchurch. Le contrôleur de Christchurch a signalé à l’avion que son radar montrait une cible au-dessus de la terre, à l’ouest de l’avion, qui semblait suivre l’avion, mais tournait vers l’ouest et se déplaçait vers l’intérieur des terres lorsque l’avion atterrissait. Le copilote a regardé vers la droite et a vu une petite lumière se déplaçant rapidement avec l’avion. Cependant, les tâches du copilote lors de l’atterrissage lui-même l’ont empêché de le surveiller en permanence et il l’a perdu de vue juste avant l’atterrissage de l’avion.
CIBLES RADAR INEXPLIQUÉES
Il a été nécessaire de présenter l’historique de ces événements afin de replacer dans le contexte la question suivante : existe-t-il des explications logiquement acceptables en termes de phénomènes conventionnels pour les cibles radar non identifiées et les observations visuelles ? Pour certains événements, mais pas tous, impliquant uniquement les cibles radar, la réponse va de peut-être à oui. Pour les événements visuels, cependant, la réponse semble être un non ferme. Comme indiqué ci-dessus, le film des trois apparitions d’une lumière bleu-blanche, quel que soit l’endroit exact où se trouvait l’avion lorsqu’il a été filmé, est complètement inexplicable car il n’y avait tout simplement aucune source pour une telle lumière. Il ne s’agit pas d’un mauvais souvenir de la part des témoins ou d’une incapacité à identifier les feux côtiers ou autres feux normaux dans la zone. mais plus près de l’avion) sont inexpliquées. L’observation d’une petite lumière devant le radeau à 0016 est inexpliquée parce qu’il n’y avait tout simplement aucune lumière visible dans cette direction. L’observation d’une lumière clignotante devant à 0027 (qui est probablement la lumière qui a été filmée) est inexpliquée, encore une fois parce qu’il n’y avait pas de lumière dans cette direction. Et enfin et surtout, l’observation d’une lumière clignotante sur le côté droit pendant quelques minutes à partir de 00h30:45 environ est inexpliquée car il n’y avait tout simplement pas de lumière comme celle-ci à voir le long de la côte éloignée ou à proximité de l’avion.
Mais qu’en est-il des cibles radar qui sont apparues près de l’avion ? Peut-on les expliquer de manière conventionnelle ? En suivant la méthode classique pour expliquer les observations d’OVNI (Irlande, 1979 : Klass, 1974 ; Klais, 1983 ; Sheaffer, 1984), on peut séparer les événements et essayer de les expliquer individuellement. Dans ce cas cela signifie qu’on analyse les détections radar en dehors de toute détection visuelle apparemment simultanée, en abordant ce problème, on peut s’appuyer sur la « relation de réciprocité » radar/visuelle énoncée pour la première fois par Klass (1974). « Chaque fois qu’une lumière est aperçue dans le ciel nocturne que l’on pense être un OVNI et que cela est rapporté à un opérateur radar qui lui a demandé de rechercher dans sa lunette une cible inconnue, presque invariablement une cible inconnue sera trouvée. Inversement, si une cible inhabituelle est repérée sur un radarscope la nuit qui est suspectée d’être un OVNI, et un observateur est envoyé ou invité à rechercher une lumière dans le ciel nocturne, presque invariablement une observation visuelle sera faite. moment, il semblera sans importance que la cible radar soit à l’ouest alors que la cible visuelle peut être projetée, au nord ou au sud – les deux observations sembleront se confirmer l’une l’autre Même si l’observation visuelle est faite plusieurs minutes ou même des heures après ou avant la observation radar, certains supposeront que la présence de l’OVNI a été positivement confirmée par ce qu’on appelle généralement « deux capteurs indépendants.
Klass a banalisé la situation en suggérant qu’une cible radar sera associée à un soupir visuel même s’ils sont dans des directions différentes ou très éloignés dans le temps. Cela pourrait se produire « dans le feu de l’action » lors d’une observation, mais une enquête et une analyse excluraient tout cas où il y aurait une différence évidente de temps, de direction ou de distance entre une cible radar et la lumière ou l’objet visuellement aperçu. Dans deux cas décrits ci-dessus, à 0016 et 0027, une lumière a été observée dans la direction d’une cible radar dès que les témoins ont été alertés de regarder dans cette direction (devant l’avion). Celles-ci semblent être des observations visuelles radar « solides » parce que les heures et les directions correspondent. Bien que le moment n’ait pas été aussi précis lors de l’événement DST vers 0031, les témoins ont vu une lumière inexpliquée dans ce laps de temps, puis le radar a semblé confirmer une lumière à « à 3h00 derrière nous » comme indiqué environ 82 secondes après la fin de l’événement DST. Bien sûr, les témoins n’ont pas pu déterminer à quelle distance se trouvaient les lumières, il n’y avait donc aucune chance de correspondance.
Le seul argument marginalement acceptable pour ces événements radar/visuels est essentiellement « statistique » : il y avait tellement de cibles radar non identifiées causées par des effets atmosphériques apparaissant et disparaissant le long de la côte que la probabilité qu’une telle cible radar apparaisse en même temps et dans une même direction qu’un feu devant l’avion serait assez bien. Le problème avec cet argument est que les cibles radar « normalement anormales », vraisemblablement le fouillis de sol normal résultant de la réfraction atmosphérique normale, apparaissaient et disparaissaient près de la côte, alors que les cibles signalées près de l’avion étaient à plus de 20 milles de la côte. où il n’y avait pas d’encombrement au sol.
L’application du principe de réciprocité de Klass à ces observations est assez simple. L’opérateur radar a déclaré qu’il avait remarqué des cibles non identifiées apparaissant et disparaissant le long de la côte d’une manière typique de la région pendant un certain temps avant que l’équipage de l’Argosy ne lui demande s’il y avait des cibles près de la côte de Kaikoura. Il n’y a prêté aucune attention jusqu’à ce que l’équipage l’appelle. L’équipage a appelé WATCC parce qu’ils avaient repéré des lumières apparaissant et disparaissant, des lumières qui leur semblaient être juste au large de la côte ou au-dessus des lumières de la ville de Kaikoura. Conformément au principe de Klass, le contrôleur radar a signalé à l’équipage qu’il avait des cibles, bien qu’elles soient plus proches de l’avion que la distance estimée par l’équipage aux lumières. Bien sûr, il est pratiquement impossible d’estimer les distances aux lumières la nuit (à moins que vous ne sachiez quelque chose à leur sujet), donc l’écart de distance n’est pas d’une grande importance. Au cours des 25 minutes qui ont suivi, l’opérateur radar a signalé de nombreuses cibles radar. La plupart du temps, les rapports de cibles radar ne conduisaient pas à des observations visuelles, de sorte que le principe a été violé plus de fois qu’il n’a été respecté. Tout cela signifie que les témoins étaient plus discriminants que ce que le principe impliquerait (des témoins moins discriminants auraient pu rapporter avoir vu des lumières qui se sont avérées être des étoiles, des planètes ou des lumières au sol connues qui auraient pu être dans les directions des cibles radar).
Klass (1983), dans un chapitre sur ces observations, a discuté de certains des événements radar et visuels décrits ici mais il n’a pas mentionné le radar/visuel à 0027, ni aucune des images du film. Sheaffer (1984) a écrit à propos de l’événement 0027 : « C’est le premier incident radar/visuel apparemment cohérent du vol. » Il n’a pas proposé d’explication à cela (il n’a pas mentionné l’événement 0016.) Ireland (1979) n’a pas discuté de détections radar spécifiques près de l’avion, mais a plutôt laissé entendre qu’il ne s’agissait que de quelques-unes des nombreuses cibles radar non identifiées « normales » qui sont toujours détectés au large de la côte de l’île du Sud. Il a mentionné les observations visuelles à 0016 et 0027 et a suggéré que les témoins avaient mal identifié les lumières de Christchurch. Cette suggestion n’a cependant aucun sens, car les lumières non identifiées n’étaient pas dans la direction de Christchurch et parce qu’ils avaient pu voir les lumières de Chistchurch (ou une lueur dans le ciel au-dessus des lumières de la ville) continuellement pendant le voyage. Son explication pour la lumière sur le côté droit à 0031, le phare sur la péninsule de Kaikoura, a déjà été discutée.
Toute la discussion sur les cibles radar jusqu’à présent n’a pas abordé une question fondamentale qui est, quelle est l’importance des cibles transitoires qui est apparu près de l’avion? Une question connexe est la suivante : qu’est-ce qui réfléchissait le rayonnement, puisque la présence de tout retour de cible sur l’écran radar signifie que quelque chose a réfléchi le rayonnement ? La réponse triviale, qu’un avion inconnu était détecté, n’est pas pertinente ici. Au cours de ces observations, il n’y avait qu’un seul avion connu dans le ciel.
ANGES RADAR
Le sujet des cibles non identifiées et des radars « angels » a une histoire qui commence pendant la Seconde Guerre mondiale. Parfois, ces cibles pourraient être associées à des réflecteurs connus, comme lorsque, par exemple, une cible se déplaçant lentement a été identifiée avec un navire voyageant en mer ou un véhicule se déplaçant sur la terre. À d’autres moments, la terre ou l’océan a été détecté, mais dans ces cas, les retours couvraient généralement de petites zones de la portée du radar plutôt que d’apparaître comme des cibles ponctuelles isolées. Mais souvent, il n’y avait pas de cause évidente pour une cible. Les cibles pour lesquelles il n’y avait pas de cause évidente étaient étiquetées « anges ».
Après la Seconde Guerre mondiale, les radaristes ont commencé à étudier le phénomène des anges. Ils ont déterminé que le radar pouvait détecter des volées d’oiseaux ou des oiseaux seuls, des phénomènes météorologiques tels que les précipitations (pluie, neige) et la foudre, des traînées d’ionisation de météorites et même des insectes sous SI6 7 8 9 10 11 les bonnes conditions de haute sismicité. Les radars les plus sensibles pouvaient aussi détecter des zones turbulentes dans l’atmosphère où il n’y avait rien de visible, des zones de turbulence en air clair ou « CAT » comme mentionné précédemment. Des choses aussi petites que des oiseaux et des insectes individuels et aussi éphémères que CAT feraient de petites cibles faibles sur une portée radar. De telles cibles pourraient apparaître sur une rotation et non sur la suivante, alors que des cibles identifiables telles que des avions ou des véhicules de surface apparaîtraient sur des rotations consécutives. Un objet en mouvement normal ferait une traînée de retours d’arc. La traînée d’arcs existerait à cause de la persistance de la lueur de l’écran radar. Chaque arc serait visible, en s’estompant progressivement, pendant plusieurs balayages du radar afin que l’opérateur puisse déterminer la vitesse et la direction de déplacement à partir de la ligne tracée par les arcs successifs.
Les radaristes ont également déterminé que la réfraction atmosphérique pouvait plier les faisceaux vers le bas afin que des objets à des altitudes plus basses ou au sol, des objets qui ne seraient normalement pas détectés car ils se trouvaient sous le faisceau, puissent être détectés. Les antennes radar rayonnent généralement une certaine puissance vers le sol (le bas du lobe principal du diagramme de rayonnement) et l’atmosphère plie toujours le rayonnement vers le bas d’une certaine quantité. Par conséquent, chaque ensemble radar de recherche détecte un certain « fouillis de sol » à proximité de l’ensemble radar. La distance à laquelle s’étend ce fouillis de sol par rapport au radar dépend de la réfraction dans l’atmosphère qui incline le lobe de rayonnement principal vers le bas. Dans des conditions de grande réfraction, la réflexion du fouillis au sol peut s’étendre sur une grande distance et le radar peut détecter des cibles au sol qui seraient normalement trop éloignées pour être détectées. Par exemple, un bâtiment à une distance de quelques milles d’un ensemble radar qui se trouverait normalement sous « l’horizon radar ». dans des conditions de forte réfraction pourrait apparaître comme une cible ponctuelle dans le fouillis de sol. (Condon et Gilmor (1969) et Skolnik (1980) fournissent de bonnes revues de la recherche sur le fouillis et les anges.) L’utilisation de MTI, comme décrit précédemment, réduirait la quantité de fouillis au sol. Cependant, les filtres MTI ne sont pas parfaits. Pour diverses raisons techniques liées à la stabilité de l’oscillateur. la scintillation atmosphérique, la rotation du faisceau, etc., les retours de cibles fixes ou se déplaçant très lentement peuvent passer « à travers » le filtre MTI.
Ainsi, des expériences ont montré que l’atmosphère claire pouvait faire apparaître des cibles radar à des endroits inattendus de deux manières : (a) courber le faisceau radar vers le bas de sorte qu’il détecte quelque chose normalement sous le faisceau et (b) agir comme un réflecteur lui-même à des endroits très éloignés. turbulence ou là où il y avait des gradients importants de réfraction.
La question suivante est, l’un de ces réflecteurs radar potentiels, oiseaux, insectes, CAT ou cibles sous l’horizon radar pourrait-il expliquer les détections radar non identifiées de Wellington ? Si l’on ne considère que les cibles proches de la côte, la réponse est oui. Sur le littoral, il y avait quelques turbulences et il y avait une réfraction atmosphérique variable. La réfraction est un effet dépendant du temps qui peut faire changer l’illumination radar des réflecteurs au sol de telle sorte que certains réflecteurs faibles peuvent apparaître à un moment et disparaître le suivant. C’est comme la scintillation optique normale de l’atmosphère (par exemple, les fluctuations assez importantes de la luminosité et les très petites fluctuations de la direction d’une étoile ou d’une lumière lointaine à l’horizon). Si, par exemple, un réflecteur au sol particulièrement puissant, comme le toit d’un bâtiment métallique, était fortement éclairé pendant le premier balayage du faisceau radar et non pendant le second, il apparaîtrait comme une cible ponctuelle que « disparu. » (Cette cible ponctuelle peut être intégrée dans une « zone cible » plus grande créée par les réflecteurs au sol qui l’entourent.) l’apparition à un autre emplacement résultant du mouvement d’un seul réflecteur pendant la durée du cycle de balayage. Dans des conditions de réfraction forte et turbulente, il peut y avoir de nombreux petits réflecteurs (points) éclairés par des quantités variables et créant de nombreuses cibles ponctuelles qui apparaîtraient et disparaîtraient sur la lunette radar, donnant ainsi l’impression de mouvement d’un ou plusieurs objets.
Bien que l’océan ne soit pas un réflecteur aussi puissant que le sol, il est également possible de capter les réflexions des vagues et, bien sûr, des navires. Par conséquent, de fortes conditions de réfraction pourraient, en principe, amener le radar à détecter des cibles anormales à la surface de l’océan qui, en raison de la dépendance temporelle de la réfraction, pourraient sembler se déplacer. C’est là que réside le cœur de l’idée suggérée par Klass et Ireland pour expliquer les cibles détectées à proximité de l’avion. Un problème avec l’application de ce genre d’explication aux cibles proches de l’avion est que l’avion a parcouru une assez longue distance et donc la zone dans laquelle il y avait des cibles radar de surface potentielles devait être au moins aussi longue et au moins plusieurs miles de large. Cela signifie qu’il aurait dû y avoir de nombreux navires ou de grandes bouées métalliques à la surface pour réfléchir le rayonnement puisque l’océan lui-même n’était pas un réflecteur suffisamment puissant du rayonnement rasant pour créer des cibles à des distances de 50 milles ou plus du radar de Wellington. De plus, puisque l’horizon radar était de 47 milles, très peu de rayonnement était disponible pour détecter les objets de surface qui se trouvaient au-delà de 50 milles (seulement la petite quantité de rayonnement qui était courbée au-dessus de l’horizon). Pour accepter cette explication, il faudrait aussi supposer que des variations dans l’illumination du faisceau radar d’un objet particulier le feraient apparaître pour un seul balayage ou pendant plusieurs balayages de l’écran radar et ne pas réapparaître jusqu’à ce que l’avion en soit si loin qu’il ne présente plus d’intérêt pour le contrôleur radar.
Un autre problème avec l’hypothèse que les cibles transitoires étaient des bouées ou des bateaux fixes à la surface de l’océan est que des cibles telles que celles-ci n’auraient pas dû apparaître de toute façon puisque la lunette de visée fonctionnait en mode MTI à l’aide d’un filtre électronique qui rejette les cibles se déplaçant lentement et stationnaires. En d’autres termes, il devait y avoir quelque chose à propos de ces cibles qui modifiait la fréquence et la phase du rayonnement lorsqu’elles le reflétaient même si elles ne bougeaient pas.
Il existe encore une autre possibilité pour les détections aléatoires de cibles, à savoir l’un des types connus d' »anges radar » : oiseaux, insectes et CAT. Cependant, le niveau de sensibilité du radar Wellington et du traitement MTI rend hautement improbable que l’un d’entre eux puisse être détecté à des distances de 50 à 100 nm du radar (voir annexe).
On peut conclure de la discussion jusqu’à présent que les cibles radar détectées près de la côte pourraient être expliquées comme les effets de la réflexion atmosphérique normale amenant le radar à éclairer des cibles au sol de manière aléatoire Cependant, ce n’est pas une explication convaincante pour toutes les cibles qui ont été observé près de l’avion et aucun d’entre eux est une explication satisfaisante pour la cible de taille double.
LA CIBLE À DOUBLE TAILLE
Klass (1983) dit à propos de l’incident DST, « Cela indiquait que soit des conditions de propagation anormales existaient, soit que, s’il y avait un OVNI dans la zone, il volait maintenant si près de l’avion que les deux semblaient n’en faire qu’un pour le radar de Wellington. » Irlande. (1979) n’ont fait aucun commentaire sur aucune des détections spécifiques de radar, mais plutôt a fait le commentaire général suivant après avoir discuté de l’apparition d’anomalies radar (les « anges radar » ordinaires du fouillis au sol) qui se produisent sur la côte de Kaikoura « si on accepte l’hypothèse que les echos radars étranges vu sur le radar de Wellington étaient liés au condition météorologiques prédominantes alors nous avons des motifs raisonnables de s’attendre à ce que les coïncidences apparentes des chocs radar au sol et des lumières nocturnes observées par les aéronefs soient en grande partie sans rapport ». En d’autres termes, si nous supposons qu’il existe de nombreux « anges radar » normaux et des cibles non identifiées, comme indiqué dans les paragraphes précédents, alors les corrélations apparentes entre les cibles radar et les lumières pourraient être simplement accidentelles, auquel cas nous pourrions traiter le lumières séparément des cibles radar.
Le raisonnement de l’Irlande implique qu’il n’y a pas eu de véritables observations radar-visuelles. Les explications proposées par Ireland et Klass sont cohérentes avec la suggestion générale de Von Eschleman selon laquelle la propagation anormale peut expliquer les OVNIS radar et, lui aussi proposerait probablement que le DST a été causé par une propagation anormale. Cependant, il ne suffit pas de simplement proposer une solution potentielle, puis de s’éloigner du problème. La démarche scientifique consiste à proposer une explication, à mettre en place un scénario réaliste basé sur l’explication proposée, puis à tenter de la prouver ou de l’infirmer. Ce processus exige que l’analyste soit plus spécifique que de simplement dire, comme l’a fait Klass, que le DST était le résultat soit d’un OVNI soit d’une propagation anormale, avec l’implication que le choix scientifique évident est la propagation anormale. L’analyste doit prendre le temps nécessaire pour bien comprendre les implications des données d’observation disponibles et pour faire la comparaison avec l’explication proposée.
Toute explication proposée basée sur les effets atmosphériques doit répondre aux questions suivantes : (a) du point de vue du récepteur radar, que ferait l’atmosphère à l’écho radar de l’avion pour que le système électronique génère et afficher un arc deux fois la longueur normale (cible de taille double (b) pourrait l’atmosphère de ceci en principe (c).quelles seraient les exigences quantitatives sur l’atmosphère pour cela à OECUT et (d) les conditions atmosphériques étaient-elles compatibles avec celles-ci. En d’autres termes, les conditions de propagation étaient-elles suffisamment «mauvaises» pour que le retour radar de l’avion Argosy puisse en fait doubler de taille?Enfin, s’il n’existe aucun moyen raisonnable par lequel l’atmosphère seule aurait pu créer le DST, existe-t-il un moyen manière dont l’atmosphère aurait pu « participer » avec un autre phénomène à la création du DST ?
Pendant l’instant DST, l’écran radar représente le retour du radeau approximativement doublé de longueur. Cela s’est produit quelques instants après qu’une cible avait été à 3:00 à 4 milles. Selon le contrôleur et le technicien, cet arc élargis s’est déplacés, sans déformation ni flexion le long de l’écran. Il a été vu sur 4 rotations ce qui signifie qu’il déplacé comme ça pendant au moins 36 secondes. Pendant ce temps, l’avion s’est déplacé d’environ 1,8 miles. Ensuite, lors de la rotation suivante, la cible de l’avion était revenue à sa taille normale. Ainsi, nous avons essentiellement quatre « échantillons » d’une situation anormale, chaque échantillon ayant une durée d’environ 0,067 seconde (la fraction de temps pendant laquelle le faisceau rotatif de 2 degrés de large illumine une cible), les échantillons étant séparés de 12 secondes. Ce que cela signifie en détail va maintenant être décrit.
Le contrôleur a déclaré que l’autre cible volant avec l’avion pouvait être à gauche ou à droite, ce qui signifie que la croissance de la taille de la cible était symétrique, c’est-à-dire que les centres de ces arcs élargis étaient alignés (dans une direction radiale éloignée du centre de l’affichage radar) avec les centres des arcs précédents sur l’affichage radar. Pour comprendre cette situation, imaginez que vous regardez du haut dans le ciel au-dessus du centre radar de Wellington et que vous voyez le faisceau radar tourner dans le sens des aiguilles d’une montre. Dans des conditions normales (avant et après le DST), en raison de sa largeur de 2 degrés, le faisceau « contacterait » l’avion lorsque le centre était à environ 1 degré à gauche de la direction vers l’avion. À ce stade de la rotation du faisceau, comme indiqué sur la portée du radar, la force de l’écho de l’avion deviendrait soudainement suffisamment forte pour que l’affichage crée une cible lumineuse. Ce serait l’extrémité gauche de l’arc lumineux représentant l’avion. Le faisceau tournerait alors au-delà du plan, créant ainsi un arc d’environ 2 degrés de large sur l’écran. L’arc lumineux se terminerait lorsque le centre du faisceau se trouverait à environ 1 degré à droite de la direction du plan. Lors de chaque rotation avant le DST, l’électronique radar créait un arc de 2 degrés et, à cause de la persistance de la lueur sur l’écran, à tout moment il y avait une traînée d’arcs faisant une ligne droite (la trajectoire de l’avion) le long de la lunette . La position réelle de l’avion était au centre de chaque arc. Afin d’avoir une idée de ce qui s’est passé pendant la condition DST, on pourrait imaginer que le faisceau a d’abord contacté le plan lorsque l’axe du faisceau était de 1,5 à 2 degrés à gauche de la direction vers le plan. Le faisceau a ensuite tourné au-delà, créant un arc lumineux de 3 à 4 degrés de long (ou environ le double de la longueur normale) sur la lunette, avec une détection finale lorsque le centre du faisceau était de 1,5 à 2 degrés à droite de la direction vers l’avion. En d’autres termes, c’était comme si le faisceau détectait l’avion environ 1 degré « trop tôt » dans la rotation et rompait le contact avec l’avion environ 1 degré « trop tard » dans la rotation.
Cependant, une analyse minutieuse de la manière dont le radar détecte et affiche des informations d’écho indique que la situation réelle n’était pas aussi simple. Pour bien comprendre ce que signifie la condition DST, il faudrait être en mesure de caractériser avec précision les « non-linéarités » du SYSTÈME, y compris (1) le diagramme de rayonnement exact de l’antenne (cela peut être approximé mais il n’est pas connu avec précision). (2) la nature du processeur du système électronique (non linéaire en raison de la limitation ou du contrôle automatique du gain) et (3) les paramètres de gain (amplification) et la réponse non linéaire de l’affichage radar (un oscilloscope cathodique à raie pour lequel la taille du spot et la luminosité EST une fonction de l’amplitude du signal qui atteint l’affichage).
En principe, la longueur d’arc supplémentaire aurait pu se produire si la largeur de champ du radar avait soudainement doublé de 2 degrés à 4 degrés. Cependant, cela ne pouvait se produire que si l’antenne se divisait en deux ou si la fréquence du radar diminuait soudainement à 12 de sa valeur normale, soit dont doublerait l’angle de diffraction (qui détermine la largeur du diagramme de rayonnement). Seule une panne mécanique ou électrique catastrophique du système radar pourrait provoquer l’apparition de l’une de ces situations et celle-ci ne se « réparerait pas » après 36 secondes. Le doublement temporaire de la largeur du faisceau n’est donc pas une explication acceptable.
Il y a deux autres possibilités
(1) deux objets également réflecteurs ont soudainement commencé à voyager avec l’avion, un à gauche et un à droite, et ils étaient à un mille de l’avion, i.e., ils étaient si près que les arcs radar de ces objets fusionnaient avec l’arc de l’avion (faisant ainsi un arc contigu à 4 degrés de long)
(2) l’amplitude de l’écho de la direction (et distance) de l’avion a beaucoup augmenté et a fait doubler la longueur de l’arc. Dans ce dernier cas, l’amplitude de l’écho devrait probablement plus que doubler en raison de la non-linéarité du système.
La première possibilité est facile à comprendre, mais elle nécessite l’existence de deux objets non identifiés volant avec l’avion. La seconde n’est pas si facile à comprendre à cause des non-linéarités du système mentionnées à la fin d’un paragraphe précédent, mais elle permet la possibilité d’une explication non OVNI. La deuxième possibilité peut être étudiée en remplaçant la non-linéarité du système par une simple proportionnalité qui sous-estimerait probablement la variation requise de l’intensité de l’écho. (La longueur de l’arc serait probablement proportionnelle à l’intensité de l’écho élevée à une puissance fractionnaire plutôt qu’à l’intensité de l’écho élevée à la première puissance.) Autrement dit, on peut simplement supposer que la longueur de l’arc d’une cible sur l’affichage radar augmenterait proportionnel à l’amplitude de l’écho. Avec cette hypothèse de proportionnalité simple, la question devient : que devrait-il arriver pour (au moins) doubler la force de l’écho ?
L’écho pourrait augmenter en force soit pour l’une, ou soit pour une combinaison de ces raisons (1) la force de réflexion ou la section efficace radar de l’avion a augmenté, (2) l’atmosphère a temporairement focalisé le rayonnement sur l’avion et/ou sur l’antenne et (3) une autre objet réfléchissant radar avec une section égale (ou plus probablement, plus grand que) celui de l’avion est apparu près de celui-ci en distance et en azimut (mais pourrait être considérablement au-dessus ou au-dessous, à cause du faisceau en forme d’éventail) et a voyagé à la même vitesse. En ce qui concerne (a), la section transversale d’un avion est fonction de l’aspect de la vue, la variation la plus notable étant que la « vue latérale » peut avoir une section transversale plusieurs fois plus grande que la vue en bout. Cependant, dans ce cas, l’avion Argosy volait en ligne droite presque à l’écart du radar et il maintenait donc une orientation constante et une section transversale constante, donc (a) est rejeté. La suggestion (c) est, bien sûr, l’explication offerte immédiatement par le contrôleur aérien lorsqu’il a dit qu’une cible voyageait avec l’avion. L’implication est que, au moins pendant l’événement DST, la section transversale de la cible non identifiée était comparable à celle de l’avion, de sorte que l’écho radar était environ deux fois plus fort que celui de l’avion seul. Pourquoi la section transversale de l’objet inconnu augmentait soudainement comme si cet objet venait d’apparaître de nulle part et qu’il diminuait jusqu’à zéro alors que la cible de l’avion était « réduite à sa taille normale », elle était connue mais, bien sûr, pourrait être la preuve d’une réorientation de l’objet, ou se pourrait être un preuve que cet objet s’est déplacé de plusieurs kilomètres (au moins) entre les rotations de faisceau radar. Tous ce que l’on sait réellement de cet objet hypothétique est que pendant 0,13 secondes séparent deux beam de rotation (soit le temps qu’il prend pour balayer la cible, (4 deg./360 deg.) x 12 sec = 0.133 sec) il était au même azimut que l’avion et à la même distance (à plus ou moins de 1/2 milles), bien qu’il aurait pu être au-dessus ou au-dessous de milliers de pieds en raison de la forme en éventail vertical du faisceau radar.
La suggestion (2) est un type d’explication basée sur les effets atmosphériques. Cette explication exige que l’atmosphère agisse comme une lentille et focalise le rayonnement. Il focaliserait l’impulsion transmise par l’antenne sur l’avion et focaliserait l’écho de l’avion sur l’antenne. Ce serait essentiellement un effet de « mirage grossissant » qui ferait que l’avion aurait deux fois sa section transversale habituelle. Pour cela, il faudrait que l’atmosphère forme une étrange sorte de lentille cylindrique d’axe horizontal et de réfraction répartie dans toute l’atmosphère entre l’avion et l’antenne radar. Tous les rayons sont courbés dans une certaine mesure par l’atmosphère, de sorte que le trajet normal des rayons entre l’antenne et l’avion aurait une courbure convexe vers le haut (c’est-à-dire que le rayonnement émis à une faible élévation angulaire se déplacerait vers le haut jusqu’à une hauteur maximale, puis vers le bas à mesure qu’il se déplace sur une distance horizontale). Pour obtenir un
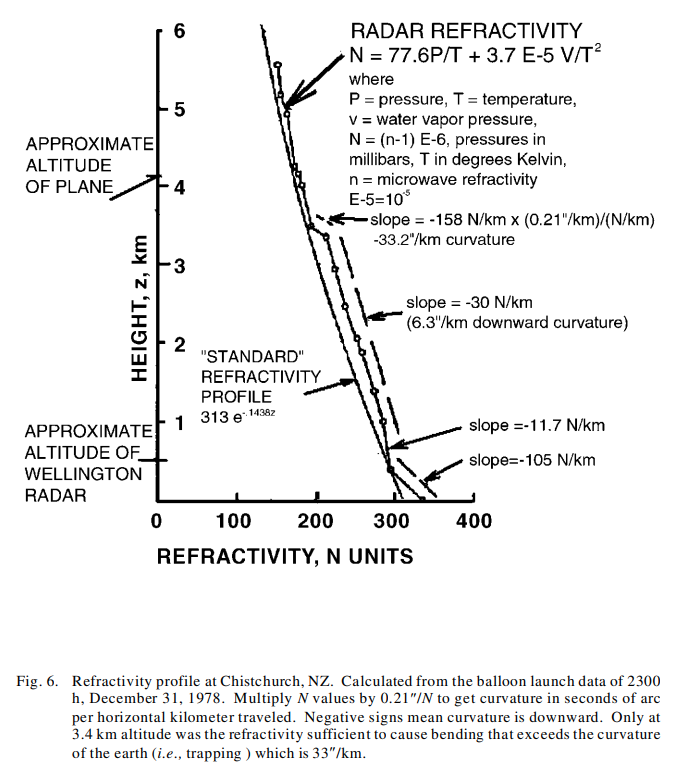
concentration de rayons, la réfraction en dessous de l’altitude de l’avion devrait diminuer quelque peu de sorte que les rayons de rayonnement d’écho qui passeraient normalement sous l’antenne radar seraient « pliés vers le haut » pour atteindre l’antenne Simultanément, la réfraction au-dessus de l’avion devrait augmenter légèrement pour que les rayons de rayonnement d’écho qui passeraient normalement au-dessus de l’antenne soient « pliés vers le bas » et atteignent l’antenne. L’effet de ce type de courbure serait de concentrer davantage puissance de rayonnement sur l’avion et de concentrer plus de puissance réfléchie sur l’antenne qu’elle ne recevrait normalement, créant ainsi un arc plus grand sur l’écran radar.
Cela pourrait-il se produire ? Peut-être, dans certaines conditions atmosphériques pour les cibles à basse altitude où il y a une humidité substantielle et l’inversion de température et ainsi la réfractivité peut changer considérablement avec la hauteur Cependant, le diagramme de rayonnement calculé à la figure 5 (en haut), qui est basé sur o Dans la réfraction en fonction de la hauteur, la figure 6 ne montre pas une telle concentration de rayons, bien qu’elle montre certains effets de la flexion vers le bas du rayonnement à des altitudes inférieures à l’avion (Davis et Hitney, 1980). Généralement, la réfraction diminue avec l’augmentation de l’altitude car la densité de l’air et l’humidité diminuent. Étant donné que la courbure des rayons est essentiellement proportionnelle au changement de réfractivité avec hauteur, c’est-à-dire à l’inverse de la pente de la réfraction comme le montre le graphique de la figure 6, la flexion diminue également généralement avec la hauteur. (Remarque : la figure 6 montre qu’il y avait une petite région de hauteur (3 à 3,5 km) sur laquelle la réfringence diminuait assez rapidement pour piéger tous les rayons qui pourraient être émis horizontalement par une antenne à cette hauteur, c’est-à-dire un conduit radar faible. voyage à l’altitude du conduit Tout rayon émis non exactement horizontalement à l’altitude du conduit quitterait rapidement le conduit.) Une condition dans laquelle la réfraction augmente avec l’altitude est une condition opposée à ce qui serait attendu sous le vent de Foehn conditions d’air sec à haute altitude au-dessus de l’air humide près de l’océan (car la réfraction augmente avec la teneur en humidité de l’air). Les conditions météorologiques connues n’étaient pas compatibles avec les conditions de réfraction requises pour une « lentille atmosphérique »: avion, donc un « grossissement » atmosphérique sur une période de 36 secondes ne peut pas être l’explication.
Puisque la réfraction atmosphérique agissant directement sur l’avion ne peut pas expliquer le DST , il faut rechercher d’autres possibilités. Une possibilité est basée sur la déviation du rayonnement vers un réflecteur, c’est-à-dire un navire, à la surface de l’océan. Supposons qu’il y avait un navire directement sous l’avion et que le radar capta soudainement ce navire pendant 36 secondes. La section transversale radar combinée du navire et de l’avion pourrait doubler la force de l’écho, ce qui pourrait doubler la longueur de la lunette. Cependant, il y a deux raisons pour lesquelles cette explication n’est pas satisfaisante. la première est que l’avion se situait à environ 84 nm de l’antenne radar et donc au-delà de l’horizon radar (47 nm pour l’antenne radar à 1 700 pieds d’altitude) pour les cibles au sol. La réfraction n’était pas assez grande cette nuit-là pour que le rayonnement frappe la surface de l’océan aussi loin (voir la figure 5). Le deuxième problème est que l’avion a parcouru environ 2 nm pendant la condition DST mais l’épaisseur avant-arrière (c’est-à-dire l’épaisseur radiale) de l’arc, qui correspond à une résolution d’environ 1 mile, n’a pas changé, selon les témoins. Si le radar captait (soudainement, pour la première fois pendant l’observation) un navire à la surface qui était exactement à la même distance que l’avion lorsque le DST a commencé, alors, 36 secondes plus tard, cela deviendrait apparent à l’opérateur radar que l’avion passait devant un objet stationnaire Puisque, selon le contrôleur, l’arc s’est déplacé le long de l’écran sans distorsion, cela ne peut pas être l’explication.
On pourrait essayer de corriger cette explication en supposant que l’ampleur de la réfraction atmosphérique (qui a provoqué la détection du navire hypothétique à 82 nm par un faisceau radar « tordu ») a immédiatement commencé à augmenter, augmentant ainsi l’amplitude de courbure du faisceau et également la longueur totale du trajet du faisceau vers le navire. Étant donné que les trajets des rayons du faisceau radar du ventilateur vertical sont convexes vers le haut, l’augmentation de la réfraction avec l’augmentation de l’altitude entraînerait une élévation du trajet du faisceau de plus en plus haut dans l’atmosphère au fil du temps. Cependant, le changement de courbure ne pouvait pas s’adapter à une augmentation de la longueur du trajet des rayons à une vitesse de 3 nm min pendant 36 secondes : cela nécessiterait que le haut du rayon incurvé se déplace vers le haut dans l’atmosphère plus mince où la flexion réfractive est moindre exactement à la moment où une flexion accrue serait nécessaire, dans cette hypothèse. Par conséquent, il n’y a aucun moyen que le retour radar d’une cible stationnaire ou se déplaçant lentement à la surface de l’océan puisse expliquer le DST même si une réfraction atmosphérique excessive se produisait.
Il existe un moyen par lequel un objet stationnaire à la surface de l’océan pourrait faciliter une détection anormale de l’avion lui-même. Plus précisément, on pourrait imaginer une situation très inhabituelle dans laquelle il y avait une grande surface réfléchissante (un navire) exactement dans la même direction que l’avion mais seulement environ la moitié de cette distance (30 – 40 nm) et donc pas au-dessus de l’horizon radar. Une partie du rayonnement dirigé vers le bas par réfraction pourrait être réfléchie de ce vaisseau vers l’avion. Dans ce cas, l’avion serait éclairé par la somme des rayonnements directs et réfléchis, une quantité de rayonnement supérieure à l’ordinaire. (Le rayonnement réfléchi par le navire hypothétique ne serait pas en phase avec celui qui a voyagé directement de l’antenne à l’avion, mais cela pourrait ne pas avoir d’importance.) L’écho reçu par l’antenne serait dû à la somme du rayonnement direct et réfléchi. . Il existe également d’autres trajets de rayons qui augmenteraient la force de l’écho, tels que directs vers l’avion, puis réfléchis par le navire et renvoyés vers l’antenne et des réflexions « d’ordre supérieur » d’amplitude beaucoup plus faible (antenne à navire à avion à navire à antenne , etc.) Cette hypothèse satisfait à l’exigence que la cible radar agrandie se déplace à la même vitesse que l’avion car les trajets radar direct et réfléchi augmenteraient au même rythme. Cependant, à moins que le navire ne soit une grande plaque plate correctement orientée (porte-avions), le rayonnement frappant le navire serait diffusé dans de nombreuses directions et ainsi le rayonnement « réfléchi par le navire » qui atteindrait l’avion serait beaucoup plus faible que l’éclairage direct. Il pourrait être assez intense pour augmenter légèrement la longueur de l’arc, mais il ne serait certainement pas assez fort pour que la longueur de l’arc soit deux fois la taille de l’avion seul. Par conséquent, il est peu probable qu’un alignement correct des surfaces sur un navire, nécessaire pour provoquer une réflexion telle que celle proposée ici, puisse réellement se produire. De plus, les navires ont tendance à rouler dans l’océan, donc même s’il y avait à un moment donné un alignement correct, la probabilité est faible que le même alignement optimal se produise quatre fois à des intervalles de 12 secondes et plus jamais. Ainsi, il apparaît qu’une réflexion intermédiaire depuis un navire ne pourrait pas expliquer le DST. Le fait que l’équipage n’a pas vu le navire faire fonctionner ses feux à la surface de l’océan doit également être pris en compte, car la plupart des navires laissent les feux allumés la nuit pour éviter les collisions. (Remarque : la possibilité qu’un fort gradient de réfraction à la frontière entre deux couches atmosphériques dissemblables au-dessus ou au-dessous de l’avion puisse agir comme un miroir a été étudiée. La conclusion, basée sur les concepts théoriques décrits dans la réf. 2, est que toute réflexion de ce type serait beaucoup trop faible pour être détecté)
Afin d’étudier la possibilité que des anomalies atmosphériques puissent expliquer le DST, j’ai contacté David Atlas (1980), un expert des effets atmosphériques sur radar. Il a souligné que les « anges de points » typiques, 1. par exemple, les échos d’oiseaux, d’insectes et de turbulence en air clair (CAT), pourraient probablement être détectés par le radar Wellington, mais il doutait que ceux-ci puissent être détectés à une distance aussi grande que 80 nm. Lorsqu’on lui a parlé de la DST, sa réponse immédiate a été « OVNI ». Ensuite, il a suggéré d’examiner de plus près les capacités de détection d’oiseaux ou de volées d’oiseaux à longue distance, bien que la preuve que le DST persiste pendant 4 rotations radar l’ait dérangé car cela semblerait empêcher les oiseaux de voler aussi vite que l’avion, une impossibilité évidente. A la suite des commentaires d’Atlas, j’ai fait une estimation de la section radar minimale pour la détection par le radar Wellington (voir annexe). J’ai également consulté Lothat Rhunke. Dennis Trizna et Donald Hemenway, scientifiques du radar et de l’atmosphère au Naval Research Laboratory Dans le cadre de cette enquête, j’ai comparé le radar de Wellington avec les résultats du radar de recherche obtenus par Atlas, Rhunke et Trizna Le résultat de cette enquête était que le radar aurait pu être capable de détecter une volée d’oiseaux à 82 nm mais pas des insectes ou de la turbulence en air clair. (Remarque : en raison de la forme en éventail vertical du faisceau, les oiseaux auraient pu se trouver à la distance et à l’azimut de l’avion et à n’importe quelle altitude au-dessus d’environ 3 000 pieds. Afin d’accepter l’explication de l’oiseau, il faut supposer que le MTI n’a pas rejeté les oiseaux pour une raison quelconque.) Une seule volée d’oiseaux pourrait avoir pour effet d’augmenter la cible radar de l’avion d’un et peut-être de deux rotations du radar si la volée se trouvait à 82 ou 83 nm du radar. Cependant, il ne pouvait pas augmenter la taille de la cible pendant trois rotations ou plus sans qu’il devienne évident pour les opérateurs que l’avion passait devant quelque chose d’essentiellement stationnaire. On pourrait essayer d’imaginer un « arrangement » bizarre de 4 troupeaux séparés de 0,6 nm (la distance parcourue par l’avion pendant une rotation de faisceau) et alignés dans la direction de l’avion, mais cela nécessite encore une explication quant à la raison pour laquelle les quatre hypothétiques les troupeaux n’ont pas été détectés à chaque rotation, ainsi qu’avant et après l’événement DST.
La possibilité qu’un effet de lobe secondaire très inhabituel causé par une puissance non rayonnée dans le faisceau radar principal ait pu créer le DST a été envisagée et rejetée en raison de la faiblesse relative des lobes secondaires. Par conséquent, il ressort de la discussion ci-dessus qu’aucune explication satisfaisante basée sur la compréhension conventionnelle du radar et de l’atmosphère n’a été proposée pour le DST. Cela doit rester une anomalie radar inexpliquée. Bien sûr, l’étroite association temporelle et spatiale entre le DST et la cible proche précédente et entre le DST et la lumière suivante sur le côté droit (avec une détection radar ultérieure sur la droite) suggère qu’il y avait un (ou plusieurs) réel. c’est-à-dire radar réfléchissant objet (ou objets) capable de se déplacer à grande vitesse qui se déplaçait avec l’avion, peut-être au-dessus, en dessous ou derrière (ou s’il y a deux objets, à gauche et à droite) pendant l’événement DST. Quelle pourrait être la cause d’un tel objet ? Toute suggestion spécifique serait pure spéculation. Cependant, cette analyse de cas montre que la spéculation est justifiée parce que « les OVNIS sont réels. »
CONCLUSION
Contrairement à l’opinion présentée par le SSE Review Panel, les « anciens cas » contiennent des informations précieuses. De plus, certaines observations radar et visuelles radar ne peuvent pas être expliquées simplement par un appel général aux caprices de l’atmosphère et aux systèmes radar. Dans certains cas, on peut conclure que l’atmosphère et les phénomènes associés à l’atmosphère (oiseaux, CAT, etc.) n’étaient pas la cause des détections anormales : Ces cas doivent être reconnus pour ce qu’ils sont, des détections d’objets anormaux, dont certains semblent être sous contrôle intelligent, mais qui ne sont pas des artefacts de la technologie humaine ou des processus naturels connus.
APPENDIX
La sensibilité de tout système radar est fonction de la puissance transmise, de la taille et de la forme de l’antenne (qui déterminent la longueur et la hauteur du faisceau), et du système de traitement électronique Ce dernier détermine le niveau de bruit en dessous duquel un écho peut être détecté Le calcul ici est pour la détection d’écho unique sans traitement spécial. Le but de ce calcul est de fournir une sensibilité approximative du système radar de Wellington. Une valeur exacte ne peut pas être déterminée car il existe plusieurs inconnues telles que le facteur de bruit exact et les facteurs de gain électronique exacts intégrés au traitement du signal.
L’équation radar simple (Skolnik 1980) est basée sur l’idée qu’une certaine quantité de puissance, Pt, dans une impulsion radar est concentrée dans un faisceau d’une certaine taille angulaire et projetée vers l’extérieur par une antenne. À la gamme R l’echo couvre une aire donné approximativement par où L est la longueur horizontale et h est la dimension verticale de l’antenne, lambda est la longueur du rayonnement et k est un facteur inférieur à l’unité qui explique le fait que l’angle solide de diffraction n’est pas simplement égal au rapport géométrique,
. Le produit kLw = A est une surface effective de l’antenne, qui est plus petite que la surface géométrique. Un objet, la cible radar, a une surface effective, C, appelée « section radar ». La cible intercepte une fraction de la puissance du faisceau qui est proportionnelle au rapport de surface,
La cible diffuse ce rayonnement dans toutes les directions (4 pı stéradians). A la distance de l’antenne ce rayonnement couvre une surface 4 piR2. L’antenne capte A/(4 pi R2) de la puissance réfléchie. La puissance reçue est donc donnée approximativement par :

où le gain d’antenne est (voir, par exemple, Condon et Gilmor 1969, page 660). L’atmosphère n’entre pas dans cette équation car l’absorption et la diffusion sont négligeables dans l’atmosphère claire aux longueurs d’onde d’intérêt ici.
Cette puissance reçue doit être supérieure au bruit électronique de base du système radar pour qu’une détection d’impulsion unique se produise. Le niveau du bruit est donné par le produit du bruit électronique (thermique ou de Johnson) dans la largeur de bande, B, du système récepteur et d’un facteur de bruit d’antenne, Nf:
où k est la constante de Boltzmann, T est la température et kT est la puissance du bruit thermique par hertz (bruit blanc, uniformément réparti sur toute la bande passante d’intérêt) qui est d’environ 4 x 10°-21 W/Hz à température ambiante. La largeur de bande est au moins aussi grande que (et probablement plus grande que) l’inverse de la durée d’impulsion, Tp. Pour la détection d’impulsion unique, j’ai supposé Pr = 2N. Avec cette information, la deuxième forme de l’équation 1 peut être utilisée pour trouver la section transversale minimale détectable, Cmin :

Selon le technicien radar, le radar Wellington a (avait, circa 1978) les caractéristiques décritent dans la table 1.
Conformément à ces spécifications la bande passante aurait été de 4 x 10°5 Hz et Nf=10°0.4=2.5 soit N=kTBNf=4×10°-15W.
TABLE 1
- TYPE: Marconi 264 (sımilar to S650H with S1055 antenna) Le système radar a subi une modernisation importante à la fin Années 1970. Cette modernisation a eu pour effet de rendre l’affichage MTI plus sensible que l’affichage radar brut (Remarque : l’insertion de filtres MTI réduit en fait la sensibilité fondamentale du radar, de sorte que dans le système radar Wellington, l’affichage radar brut n’était pas utilisé. à sa capacité maximale théorique.)
- Puissance: 500 kW
- Fréquence : 587 MHz (A = 0,51 m, radar UHF)
- Durée d’impulsion : 2,7 microsec (2,7 x 10 sec)
- Taux de répétition des impulsions : variable, en moyenne 500/sec
- Dimensions de l’antenne : 4,3 m de haut par 16 m de long. Parabolique : 69 m2
- Gain d’antenne : 30 đb sur un dipôle
- Bande passante : 2,1 ± 1 degrés horizontal ; diagramme de rayonnement au carré cosécant ; le lobe inférieur du diagramme de rayonnement est d’environ 7 degrés de large verticalement
- inclinaison de l’antenne : le lobe inférieur de le diagramme de rayonnement incliné 4 deg vers le haut
- hauteur de l’antenne : 1 700 pieds au-dessus du niveau de la mer horizontal
- Polarisation : Horizontale
- Temps de révolution : 12 secondes
- Facteur de bruit : estimées à 4 db
- MTI : ont utilisé un déphasage et une électronique de balayage numérique, réglés pour exclure les cibles normales à des vitesses radiales inférieures à 15 nm/h, les observations de cibles connues avec MTI activé et désactivé ont indiqué que le traitement MTI rendait les cibles plus visibles sur l’affichage; des cibles apparemment fortes sur l’écran MTI pourraient être faibles ou inexistantes sur l’écran lorsque le MTI était éteint.
- Précision de distance absolue : 1 % de la pleine échelle
- Précision de distance relative : environ 1 mile sur l’échelle de portée maximale
- Gamme maximale : 150 nm
- Affichage : Indicateur de position en plan (PPI), réglé à l’échelle de distance maximale pendant ces observations ; Gamme de 10 nm indiquée sur l’affichage
Par conséquent, la force d’écho minimale pour la détection serait d’environ 8 x 10°-15 W. Le gain d’antenne d’un dipôle est de 2 db (sur le gain d’un radiateur sphérique) de sorte que le gain total de l’antenne est évalué à 32 db = 10°3.2 = 1585. (Notez que la zone réelle de l’antenne mesure environ 69 m, donc le gain « devrait » être de [4pi x 69)/(0,5)]² = 3 468.
Par conséquent, le facteur k, défini ci-dessus, est de 1 585/3468 = 0,45. En d’autres termes, la zone effective est d’environ la moitié de la surface actuelle). Cela signifie que dans une direction le long de l’axe du faisceau radar, il y a 1 585 fois plus de puissance par unité de surface qu’il n’y en aurait si l’antenne rayonnait uniformément sous tous les angles, c’est-à-dire comme un radiateur sphérique. Puisque que le lobe principal de l’antenne était incliné vers le haut d’environ 4 degrés et puisque l’avion était à une élévation angulaire d’environ 1,4 degrés, il est vraisemblablement tout autres cibles « OVNI » potentielles telles que des oiseaux se trouvaient en dessous de l’axe du faisceau.
Cela signifie que la puissance réelle rayonnée dans la direction vers ces cibles était inférieure à celle rayonnée le long de l’axe du lobe principal par un facteur inconnu (inconnu car la forme exacte du faisceau radar, tel qu’affecté par l’atmosphère à ce moment particulier, est inconnue). La meilleure approximation du facteur de gain réel dans la direction de l’avion est fournie par le diagramme de rayonnement de la figure 5. La limite extérieure du diagramme indique qu’un objet pouvant être détecté à une certaine distance lorsqu’il se trouve sur l’axe principal du faisceau à 50 000 pieds, peut être détecté à 70 % de cette distance s’il était à 14 000 pieds Puisque la plage de détection est proportionnelle au carré du gain et inversement à la quatrième puissance de la plage, il faut que le gain dans la direction vers 14 000 pieds correspondent à (0,7)°(2/4) = 0,83 du gain le long de l’axe principal.
Par conséquent, 1 585 peut être remplacé par environ 1 585 x 0,83 = 1 315. L’insertion des quantités appropriées dans l’équation 3 donne, à 82 nm = 152 x 10°7 cm et lambda = 50 cm,

En raison des incertitudes sur certaines des quantités qui sont entrées dans ce calcul, la section transversale minimale de 392 cm² doit être considérée comme une approximation de la valeur réelle. Cependant, il serait probablement correct de dire que la section devrait être d’au moins plusieurs centaines de centimètres carrés pour une détection à 82 nm. Cela peut être comparé à la section transversale d’un oiseau typique qui pourrait voler au moment du DST et qui est de 1 à 10 cm². Une volée d’oiseaux pourrait avoir la section requise. Bien sûr, s’il y avait une volée d’oiseaux très proche de l’avion Argosy pendant n’importe quelle partie du DST, on s’attendrait à ce que la volée n’apparaisse pas soudainement puis disparaisse. Il aurait été détecté à la fois avant et après le DST.
REMERCIEMENTS
Je remercie Illobrand von Ludwiger pour m’avoir fourni les détails du suivi radar de l’objet inconnu « Mach 3 ». Je remercie les témoins des observations en Nouvelle-Zélande pour leur coopération pendant l’enquête. Je remercie le service météorologique néo-zélandais pour les données atmosphériques de haute altitude (lancement de ballon) et Neil Davis et Herbert Hitner ont utilisé ces données pour calculer un diagramme de rayonnement approximatif pour le rad de Wellington, merci David Atlas, Lothar Ruhnke, Dennis Trizna et Donald Hemenway, pour leurs discussions utiles sur les effets atmosphériques sur le radar et Mark Rodeghier pour ses commentaires d’aide. Enfin, je remercie la Society for Scientific Exploration de m’avoir donné l’occasion de raconter l’histoire et l’analyse du cas radar-visuel néo-zélandais qui n’étaient pas pleinement appréciés à l’époque où ils se sont produits.
RÉFÉRENCES
Atlas, D. (1979). communication privée
Condon, E. U. et Gillmor, D. S. (1969). Étude scientifique des objets volants non-identifiés New York: Bantam Press.
Davis, N. & Hitney, H. (1980). communication privée
Fogarty, Q. (1982). Espérons qu’ils soient amicaux. Australie : Angus et Robertson Haines, R (1987). Incident de Melbourne Los Altos, Californie LDA.
Irlande, W. (1979). Observations inconnues de lumières dans le ciel nocturne, rapport n° 659, Wellington. Département de la recherche scientifique et industrielle
Klass. P.J. (1974). Les ovnis expliqués New York : Random House
Klass. P.J. (1983). OVNIS, Le public trompé Buffalo: Prometheus Books
Maccabee, B (1979a). What Really Happened in New Zealand, Mutual UFO Journal, mai et juin;
Maccabee, B. (1979b) Analyse technique du film néo-zélandais. (non publié)
Maccabee, B (1979c). Propriétés photométriques d’un objet brillant non identifié vu de la côte de la Nouvelle-Zélande Appl. Optique, 18, 2527
Maccabee, B (1980). Propriétés photométriques d’un objet brillant non identifié vu de la côte de la Nouvelle-Zélande : réponse de l’auteur aux commentaires. Appl Optics, 19, 1745 Maccabee, B. (1987). Analyse et discussion des images d’un groupe de lumières clignotantes périodiques filmées au large des côtes de la Nouvelle-Zélande. Journal of Scientific Exploration 1, 149
Sheaffer, R. (1984). Le verdict OVNI. Buffalo: Livres de Prométhée
Skolnik M. (1980). Introduction aux radars. New York McGraw-Hill;
Skolnik M. (1970) Manuel des radars. New York : McGraw-Hill
Startup, W. et Illingworth, N. (1980). Les OVNIS de Kaikoura. Auckland Hodder et Staughton
Sturrock, P. (1998). Preuves physiques liées aux rapports d’OVNIS: Les actes d’un atelier tenu au Pocantice Conference Center, Tarrytown, New York 29 septembre-4 octobre 1997. Journal of Scientific Exploration, 12, 170(1998)